33. 高并发场景下应该如何设计缓存一致性方案?
今天我们继续来聊聊缓存相关的话题,因为它实在是太重要了。说实话,仅仅通过缓存这一问题就能瞬间检验出候选人是只懂 CRUD 的码农,还是对系统架构有深刻理解的工程师。
上一篇文章我们拆解了 Cache Aside、Write Back 等经典缓存模式,但是无论哪种缓存模式:这些“标准答案”在极端并发下,要么丢数据,要么会出现短暂的数据错乱。那么:到底有没有一种方案,能像瑞士银行一样,保证数据库和缓存绝对的一致?
今天,秀才就把自己多年架构设计中踩过的坑做个总结,带你彻底把“缓存一致性”这个硬骨头彻底搞清楚。接下来我们会从最基础的并发模式讲起,一直聊到那些能让面试官眼前一亮的终极架构方案。
为了能看懂后面那些神操作,我们得先复习一个并发编程里的“基本功”——Double-Check(双重检查)。
1. Double-Check模式
Double-Check 并非单例模式的专属,它是所有高并发系统设计中平衡“性能”与“安全”的通用法则。其核心逻辑可以概括为八个字:检查、加锁、再次检查。
为什么要有两次检查?因为加锁是很贵的(性能损耗大)。我们希望在不加锁的情况下先快速判断一次,如果条件满足直接返回,这样能扛住 99% 的流量;只有那 1% 的特殊情况,我们才加锁处理。
来看一段伪代码,感受一下它的精髓:
// Double-Check 模式深度演示
// 场景:我们需要获取某个关键配置或热点数据,如果内存里没有,需要去加载
func doubleCheck() {
// 第一步:第一次检查(First Check)
// 这里我们先加一把“读锁”。读锁是共享的,大家都能进,性能很高。
rlock()
if !checkSomething() {
// 如果发现数据不存在,或者条件不满足,我们需要做变更(比如加载数据)。
// 读锁是不能升级为写锁的,所以必须先释放读锁。
runlock()
// 第二步:加写锁(Locking)
// 此时进入“独占”模式,同一时刻只有一个线程能执行下面的代码。
lock()
// 第三步:第二次检查(Second Check)—— 这是灵魂所在!
// 千万别忘了这一步!因为在你释放读锁、去抢写锁的这个微小时间差里,
// 可能已经有别的线程捷足先登,把数据加载好了。
// 如果你不查,直接覆盖,就可能做重复劳动,甚至覆盖掉最新的数据。
if !checkSomething() {
// 只有确认数据真的不存在,才执行昂贵的加载逻辑
// 比如查询数据库、复杂计算等
doHeavyBusinessLogic()
return
}
// 如果第二次检查发现数据有了,说明我们躺赢了,直接释放锁即可。
unlock() // 释放写锁
} else {
// 数据本来就有,直接释放读锁返回,性能损耗极小
runlock()
}
}举个实战的例子:我们要读取一个商品的详情,ID 是 8848。
你先加读锁,看本地缓存里有没有 8848。
如果有,直接返回。
如果没有,你释放读锁,去抢写锁。
抢到写锁后,必须再次看一眼缓存里有没有 8848。因为可能有一百个线程同时发现没有,你是第一百个抢到锁的,前面九十九个已经把活干完了。
如果还是没有,你再去查库、回写缓存。
这个模式还有两个常见的变种,大家在架构设计中要灵活运用:
无锁初检:第一次检查时不加任何锁。这在分布式锁场景下特别常见,因为分布式锁通常没有“读锁”的概念,或者加锁网络开销太大。直接裸读,读不到再去抢分布式锁。
原子操作替代:如果检查的逻辑非常简单(比如只是判断一个 int 状态),可以用 CAS 等原子操作来替代读锁,进一步压榨性能。
把这个模式记在心里,它是我们后面解决复杂一致性问题的钥匙。
2. 面试准备
在深入技术细节前,我想聊聊面试技巧。当面试官抛出“怎么保证缓存一致性”这个问题时,他其实是在钓鱼。如果你上来就背诵“延时双删”,那你就上钩了。
真正的高手,会先通过几个反问,把问题的边界圈定清楚:
现状盘点:“在讨论方案前,我想确认一下,咱们现在的业务场景里,缓存是用在什么地方?是全量数据缓存,还是只缓存热点?”
容忍度分析:“业务方对不一致的容忍度是多少?是必须要毫秒级一致(强一致),还是说允许几秒钟的延迟(最终一致)?如果是价格数据,可能要求高;如果是点赞数,可能要求低。”
兜底机制:“如果真的出现了不一致(比如 Redis 挂了),我们有多久能发现?有没有后台的对账程序(Reconciliation)在自动修复?”
这三个问题一抛,面试官立马就会觉得:这个人懂架构,知道抛开业务谈技术都是耍流氓。
实际上,越追求强一致性,系统的性能损耗(Latency)和架构复杂度(Complexity)就越高。我们做架构设计的目的,不是为了追求完美的“强一致”,而是要清楚地知道不一致的风险在哪里,并告诉业务方:我们能做到什么程度,以及在最坏情况下,数据会在多久内达成一致。
接下来,我们就像剥洋葱一样,一层层揭开数据不一致的根源。
3. 不一致的两个根因
当你分析任何数据不一致问题时,都可以将其归结为两大核心根因:
源自操作的部分失败(Partial Failure)
源自并发操作的时序错乱(Race Condition)
如果你能在面试中开篇明义地指出这两点,绝对是一个巨大的亮点。因为大多数人只盯着“并发”看,而忽略了分布式环境下“部分失败”这个客观存在的物理定律。
3.1 部分操作失败
这是最难解决的硬伤。在微服务和分布式系统中,原子性(Atomicity)是一个极其奢侈的属性。比如一个最简单的“更新用户积分”的操作,在架构层面实际上包含了两个独立的网络调用:
更新数据库(MySQL)
更新缓存(Redis)
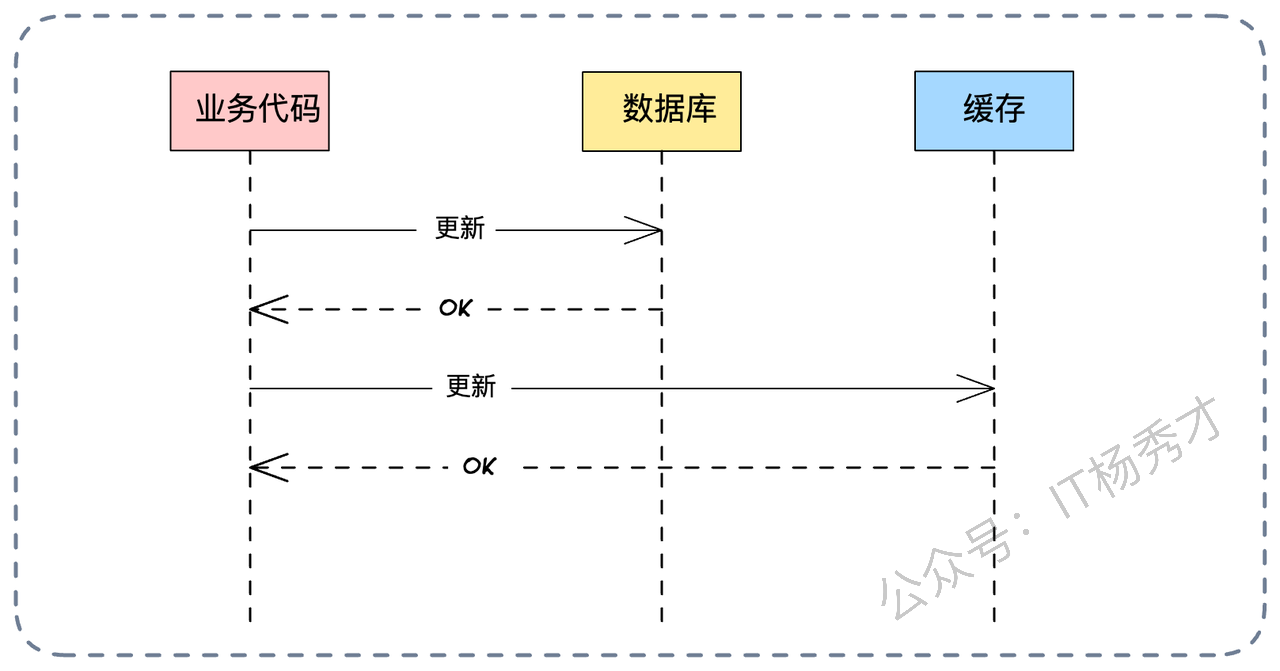
理论上,为了保证一致性,我们要求这两个动作要么同时成功,要么同时失败。这本质上就是一个分布式事务问题。
然而现实很骨感。绝大多数缓存中间件(如 Redis、Memcached)并不支持标准的 XA 分布式事务协议。这意味着,你没法让 MySQL 和 Redis 在一个事务里同生共死。
一旦数据库更新成功了,但在发起 Redis 更新请求时网络断了,或者 Redis 突然宕机了,那么数据库里就是新积分,缓存里就是旧积分。这时候,数据就不一致了。所以在现有的技术条件下,对于“部分失败”导致的不一致,结论是:不可避免。
我们能做的,是尽最大努力去补救。比如通过重试机制、将失败的操作写入消息队列进行异步补偿、或者通过定期的后台脚本校对数据。这里的目标是最终一致性。
3.2 并发操作失败
相比于部分失败,并发操作导致的不一致是更有技术含量,也是可以通过精妙的架构设计来解决的。
上一篇文章我们分析的 Cache Aside 模式中的很多坑,都是并发引起的。解决这类问题,核心思想只有一个:序列化(Serialization)。说白了,就是让并行的操作,乖乖排队,或者逻辑上互斥。
我们来看一个典型的并发导致不一致的场景:
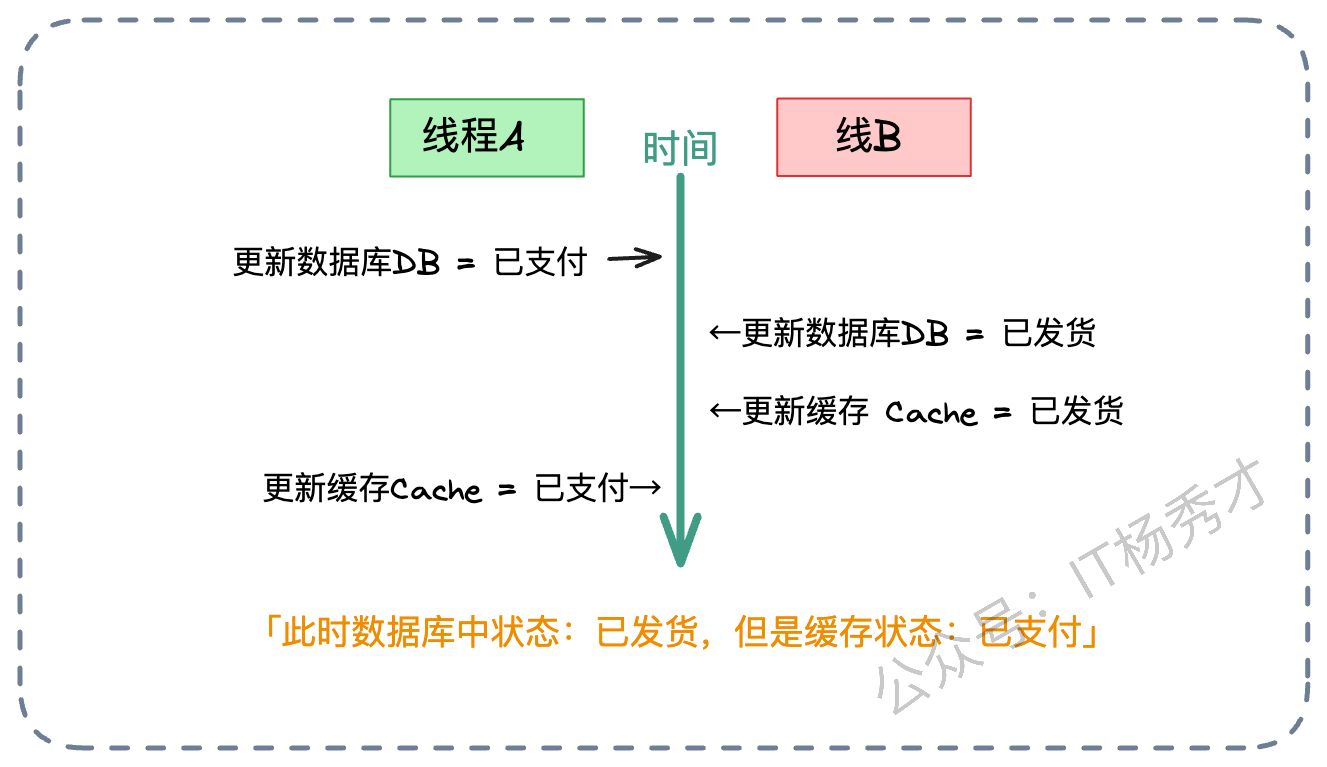
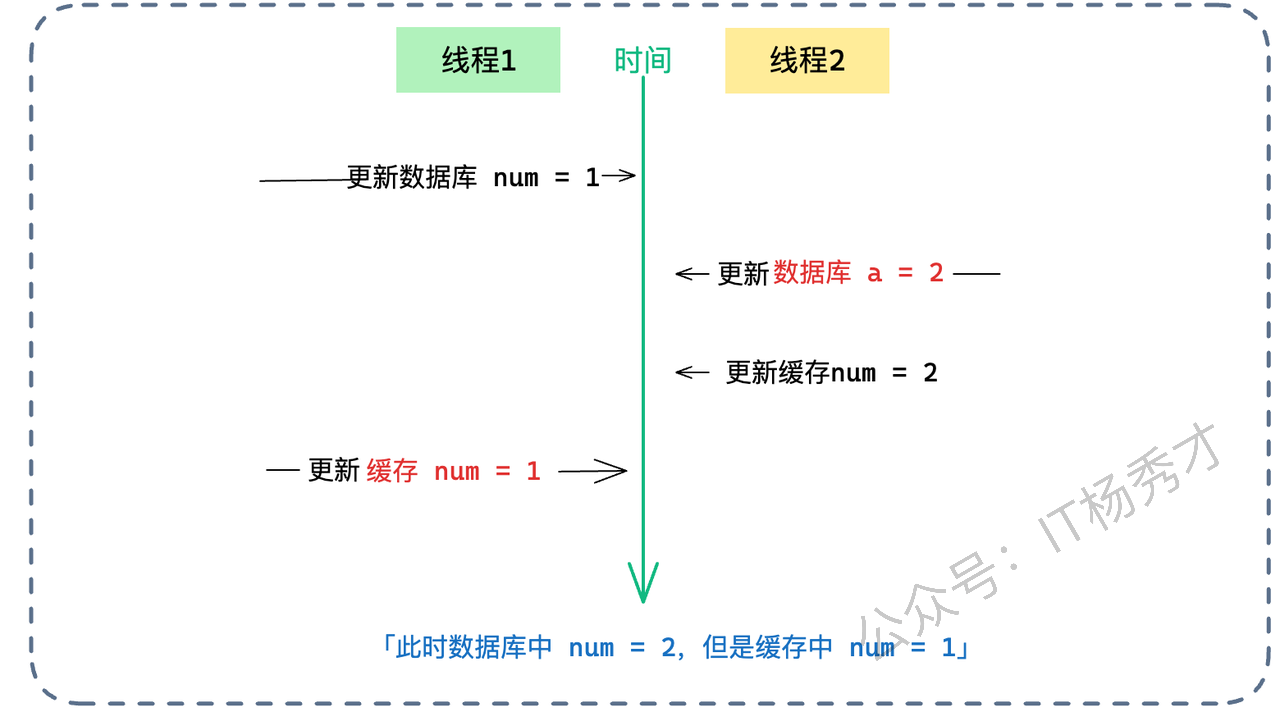
假设有两个线程,线程 A 和线程 B,它们都要修改同一个订单的状态:
线程 A 想要把状态从“待支付”改为“已支付”。它先成功更新了数据库(DB=已支付)。
线程 B 紧接着想要把状态从“已支付”改为“已发货”。它也更新了数据库(DB=已发货)。
按理说,缓存最后应该也是“已发货”。
但是,由于网络延迟或 CPU 调度,线程 B 的动作比较快,它先更新了缓存(Cache=已发货)。
线程 A 此时才姗姗来迟,执行了它的第二步操作——更新缓存(Cache=已支付)。
结果就是:数据库里是“已发货”(新状态),缓存里是“已支付”(旧状态)。只要缓存不过期,用户看到的状态永远是错的。针对这种并发乱序,我们可以祭出四把武器:消息队列、版本号、多级缓存策略,以及大杀器分布式锁。
4. 核心解决方案
既然“部分失败”只能靠重试和补偿,那我们今天的重点就是攻克“并发更新”带来的难题。
4.1 方案一:消息队列
既然我们要把并发转为串行,那最自然的思路就是——排队。我们可以引入消息队列(Kafka、RocketMQ 等),利用其天然的有序性。
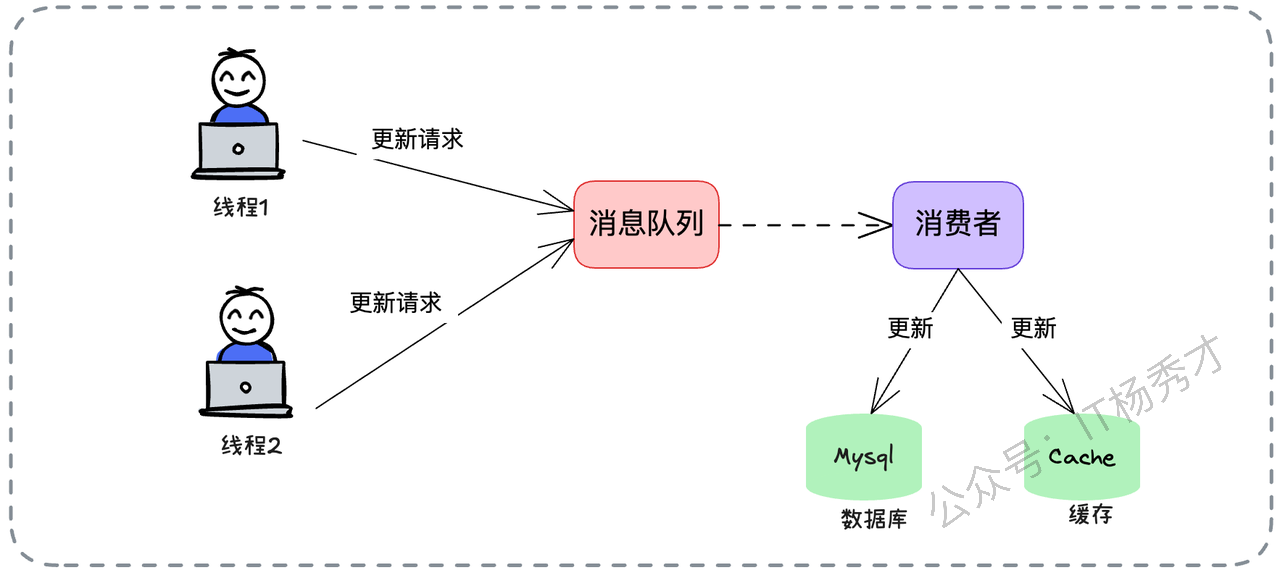
具体流程如下:
所有的写请求(Update),不直接操作数据库,而是封装成消息发送给 MQ。
确保针对同一个业务 ID(比如订单 ID)的消息,被路由到同一个 Partition(分区)。
消费端启动一个消费者,按顺序从队列里取出消息。
消费者依次执行“更新数据库”和“更新缓存”的操作。
这样,哪怕前端有 1000 个并发请求打进来,到了消费端这里,也变成了流水线上的一个个任务,严格按照先后顺序执行。并发问题瞬间就迎刃而解了。但是,这个方案也有局限性:它把同步操作变成了异步,实时性会下降。如果业务要求写完必须立马读到,这个方案就不太适用了。
4.1.1 变种方案:先更库,再发消息
还有一种常见的变种:为了保证数据库的实时性,业务线程先同步更新数据库,然后发一个消息给 MQ,让消费者去异步更新缓存。
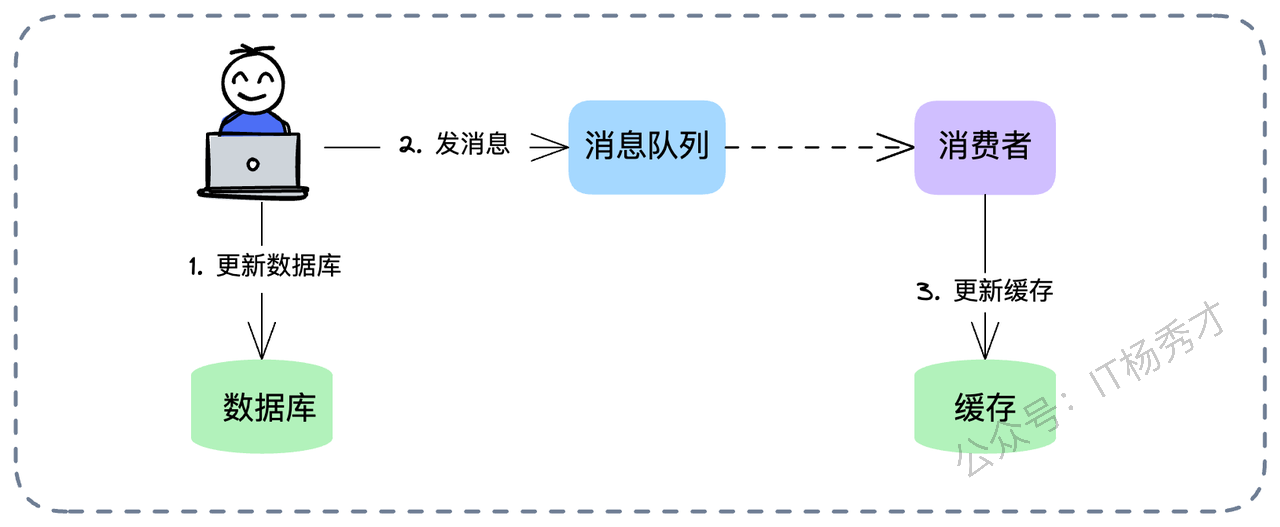
这个方案看似完美,其实藏着一个巨大的并发陷阱。如果消费者完全依赖消息体里的数据去更新缓存,依然会有问题。因为“更新数据库”和“发消息”这两个动作之间不是原子的,而且消息在网络传输中可能会乱序。
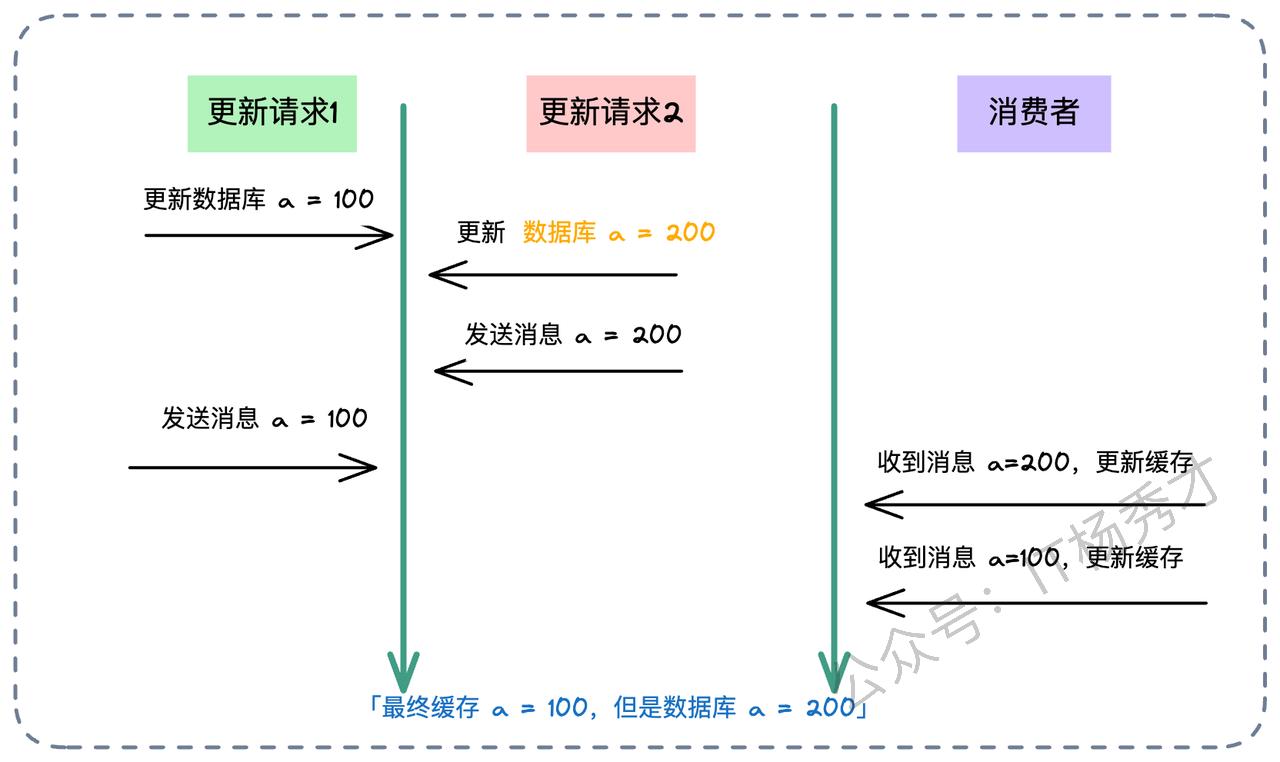
比如:
线程 A 把库改成了 100,发消息 M1(内容:100)。
线程 B 把库改成了 200,发消息 M2(内容:200)。
如果消费者先收到了 M2,把缓存改成了 200。
紧接着收到了 M1,把缓存改成了 100。
最终状态:库是 200,缓存是 100。 又是脏数据!
架构师的建议: 在这种方案下,最好把 MQ 当作一个“信号触发器”,而不是“数据载体”。 消费者收到消息“ID=5 的数据变了”之后,不要直接用消息里的值,而是去查一遍数据库的最新状态**,然后再回填缓存。或者,更进一步,使用像 Canal 这样的组件监听 MySQL Binlog,将数据库变更自动同步到缓存,这其实就是 Refresh Ahead 模式的工程化实践,效果更佳。
4.2 方案二:乐观锁与版本号
另一种解决并发的经典手段是引入版本号(Versioning),也就是我们常说的乐观锁思想。我们在数据表中增加一个 version 字段。每次更新数据时,version 必须 + 1。 更新缓存时,我们比较数据的版本号:只有当新数据的版本号 > 缓存中已有数据的版本号时,才进行覆盖;否则说明是旧数据,直接丢弃。
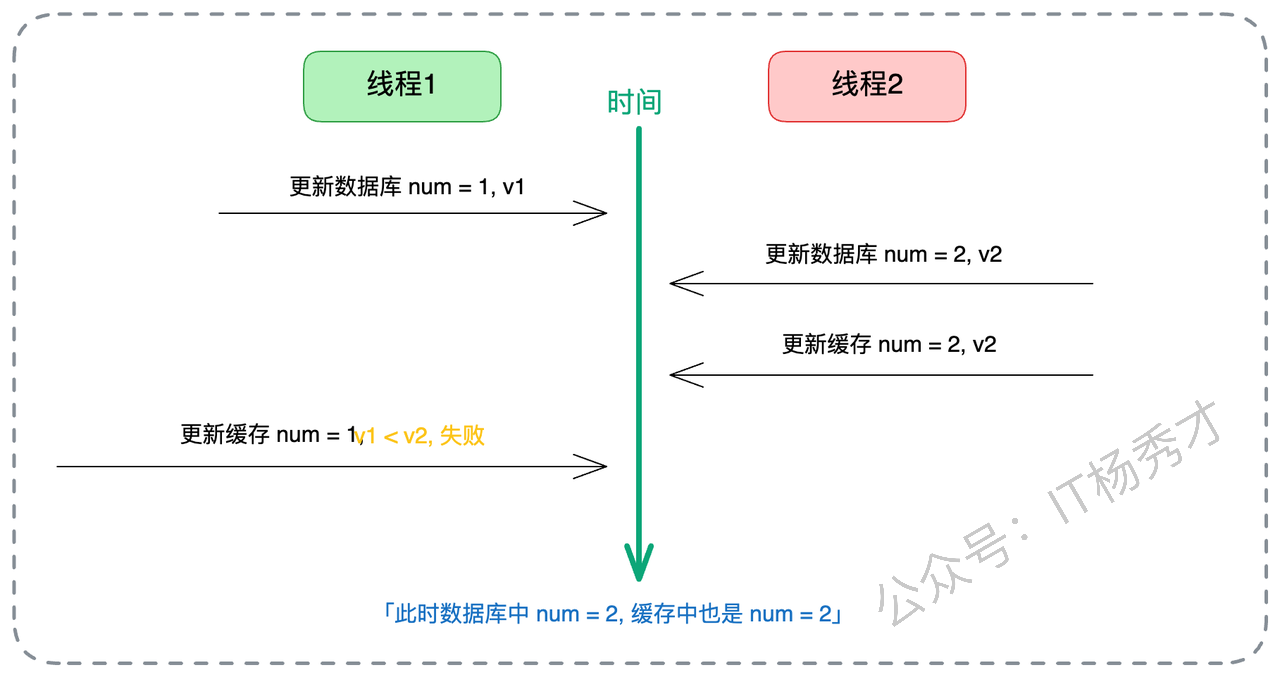
在这个机制下,哪怕线程 A 的旧数据(v1)因为网络拥堵,比线程 B 的新数据(v2)晚到,缓存更新逻辑也会发现:v1 < v2,这是一条过期的数据,我不接受。从而完美保护了缓存的正确性。
在工程实践中,维护一个专门的 version 字段可能比较麻烦。我们也可以用数据的最后更新时间戳(Last Updated Time)来代替版本号。如果是 Redis,可以通过 Lua 脚本来实现“比较版本并更新”的原子操作,确保检查和写入是原子的,防止中间被插队。
5. 进阶场景:多级缓存更新策略
在如今的高性能后端系统中,为了追求极致的响应速度,我们通常不会只用一层缓存,而是采用 本地缓存(Local Cache,如 Caffeine) + 分布式缓存(Remote Cache,如 Redis) + 数据库(Database) 的三级架构。
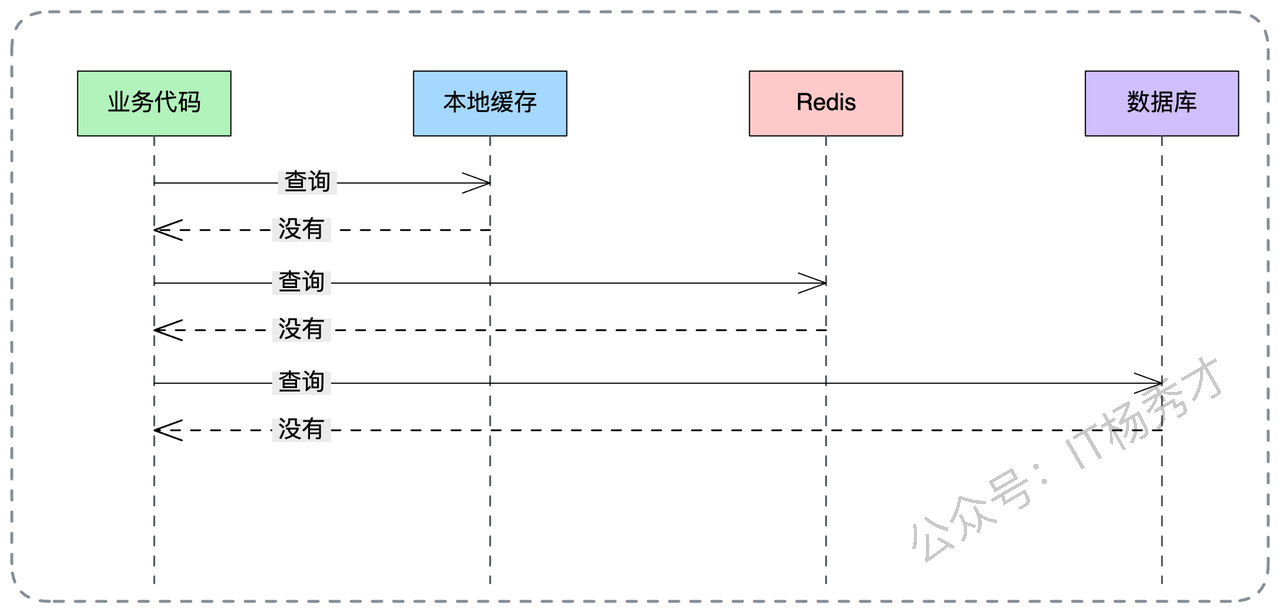
在这种复杂的“套娃”架构下,更新顺序就变得非常有讲究,稍微搞错一步,数据就乱了。首先确立一个绝对原则:数据库永远是 Source of Truth(真理之源)。所以,无论怎么排,第一步必须是更新数据库。剩下的问题是:先更本地缓存,还是先更 Redis?
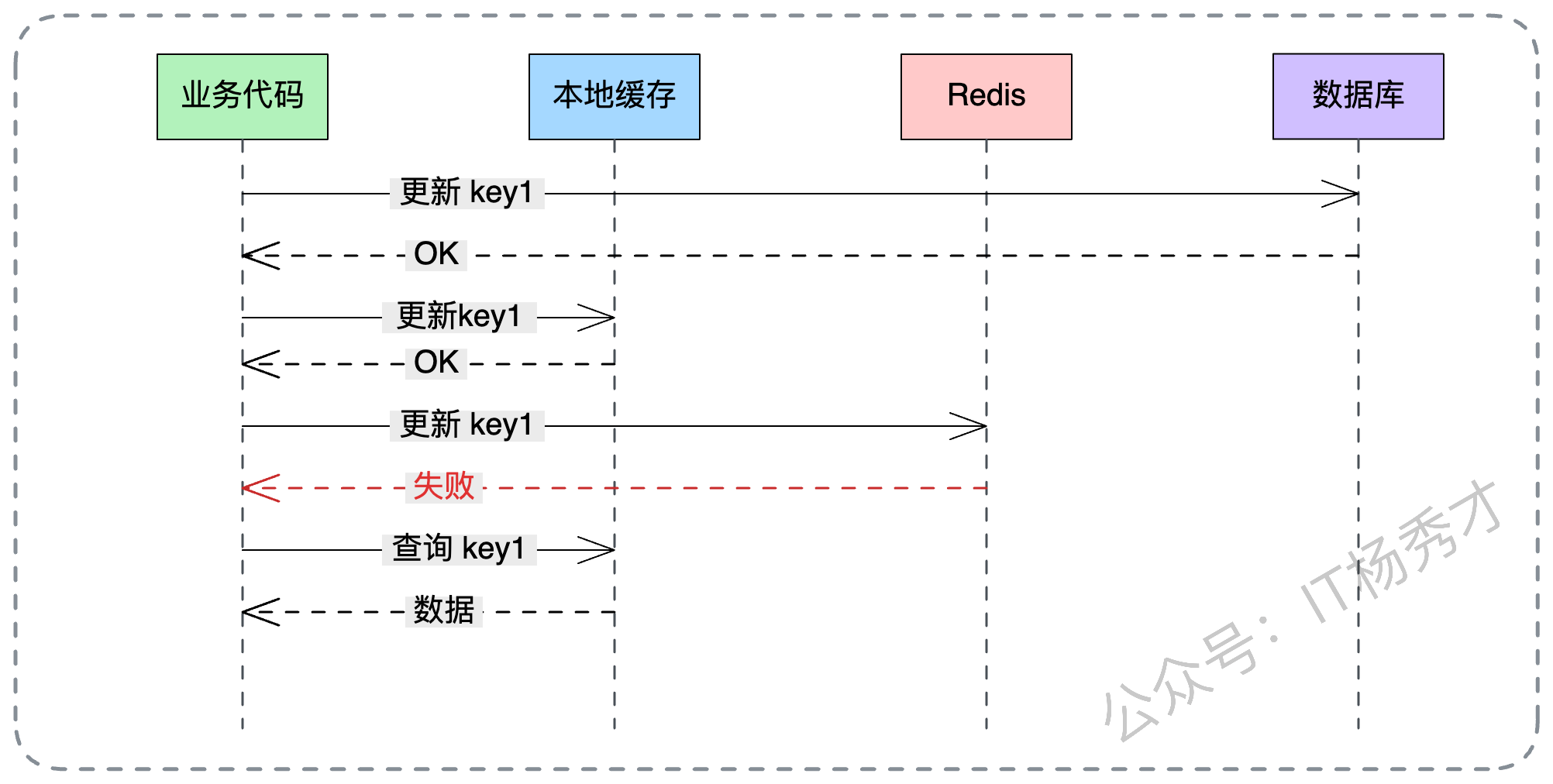
我的建议是:先本地,后 Redis。 即:Update DB -> Update Local Cache -> Update Redis。让我们深入分析一下为什么要这么做:
高可靠性:更新本地缓存是在当前 JVM 进程内存中操作,几乎不会失败。把最稳的操作先做了,至少保证了当前这台机器的数据是对的。
用户体验优先:读取链路通常是 先查本地 -> 再查 Redis。先更新本地缓存,能保证当前应用实例上的用户立马看到最新数据,实现了“Read Your Writes”的一致性体验。
防脏读兜底:假设 Redis 更新失败了(比如网络抖动),或者 Redis 里的数据还没来得及同步。当请求进来时,只要命中了本地缓存,就直接返回最新值了,根本不会去 Redis 读那个旧数据。本地缓存充当了一个临时的“正确数据避风港”。
当然,引入多级缓存后,数据不一致的概率从理论上是成倍增加的。比如,机器 A 更新了数据库和自己的本地缓存,但机器 B 的本地缓存还是旧的。这时候用户请求如果打到了机器 B,看到的还是旧数据。这需要配合**广播机制(如 Redis Pub/Sub)**来通知所有节点失效本地缓存,但在通知到达之前,短暂的不一致是必须容忍的。
6. 亮点方案
如果你想在面试中脱颖而出,拿到 S 级的评价,光讲上面的常规方案可能还不够。下面这两个方案,能展示你对架构深度的掌控力,属于面试中的“大招”。
6.1 亮点一:一致性哈希 + Singleflight
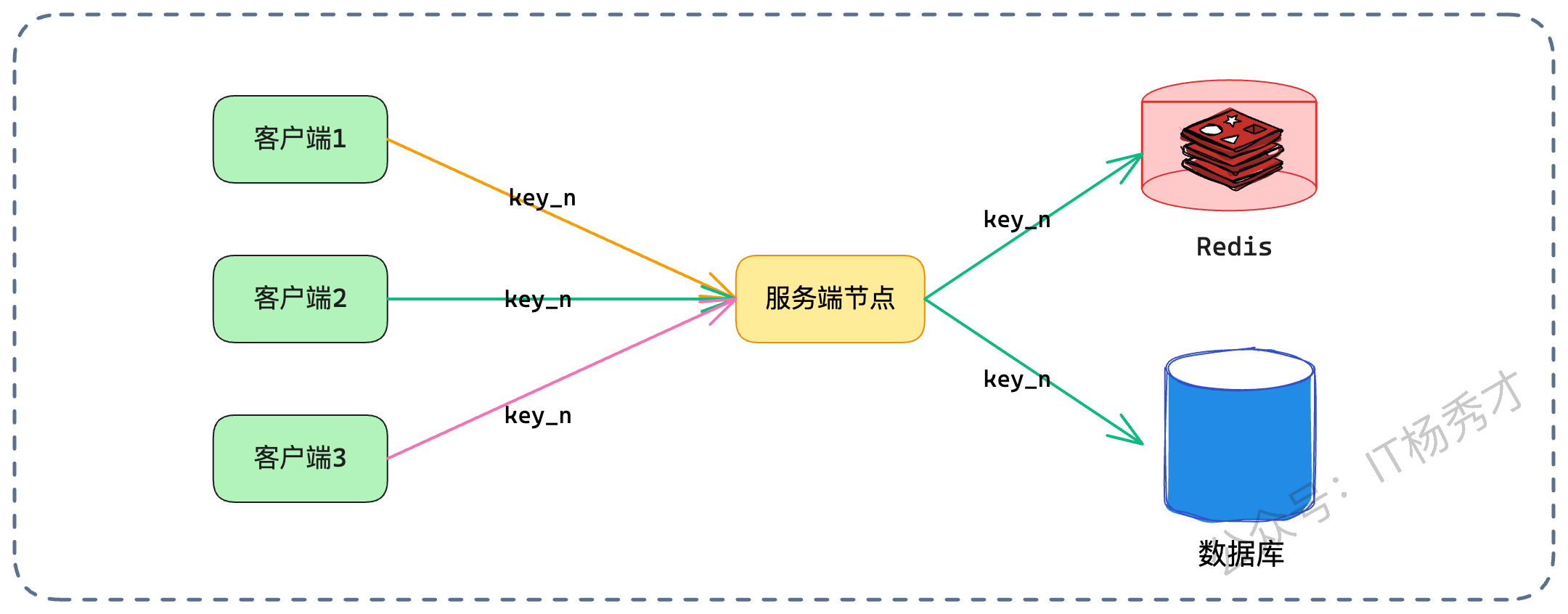
我们在微服务负载均衡中常提到一致性哈希(Consistent Hashing)。通常是为了数据分片,但在这里,我们可以把它和缓存更新巧妙结合起来。核心思路是:利用一致性哈希负载均衡算法,让针对同一个 Key 的所有请求(无论是读还是写),都路由到同一个服务节点上处理。
这样做的好处是什么? 它把一个棘手的分布式并发问题,降级为了简单的单机并发问题。 既然针对 Product ID=100 的所有请求都在 Node A 这一台机器上处理,我们就不需要分布式锁了,直接使用单机并发控制手段即可。
这时候,我们可以引入 Go 语言中著名的 Singleflight 模式(Java 中也有类似的实现)。 Singleflight 的作用是“请求合并”。当有 100 个请求同时要读取 key=100 的数据时,Singleflight 保证只会有一个请求去查库,其他 99 个请求等待结果共享。 在更新场景下,我们可以利用类似的机制,控制让这一个节点内的更新请求串行化,或者合并更新。
6.1.1 节点扩缩容导致不一致
这个方案看起来很美,但最大的软肋在于节点变动。 当服务扩容(新节点上线)或者缩容(节点下线)时,哈希环会发生变化,一部分 Key 的流量会从老节点漂移到新节点。 这就导致了在切换的短时间内,可能有新老两个节点同时在处理同一个 Key。两个节点之间没有锁同步,分布式并发问题就会“死灰复燃”。
怎么解? 这里有个很“贼”、但也非常实用的思路:新节点“静默”机制。
当新节点上线后的最初一小段时间内(比如前 2 秒),它对于缓存采取**“只读不写”,或者甚至“直接穿透”**的策略。
如果是读请求,直接查数据库,不走缓存,也不回写缓存。
如果是写请求,只更库,不更缓存。
等待网络中残留的、或者老节点正在处理的请求自然结束。
虽然在这两秒内,该节点的响应时间会变慢(因为请求全部穿透到数据库),但完美避开了新老节点并发写缓存导致的数据不一致风险。这个思路体现了架构设计中的折中(Trade-off)艺术——用短暂的性能损耗,换取数据的一致性安全。
6.2 亮点二:分布式锁
分布式锁是解决并发的万金油,但怎么用好它,大有文章可做。很多人只知道加锁,却不知道怎么加才对。我们来看两个流派。
6.2.1 先本地事务,后分布式锁(常规打法)
这是一个比较中规中矩的思路:
开启本地事务。
执行数据库更新。
提交事务。
加分布式锁 -> 删除缓存 -> 释放分布式锁。
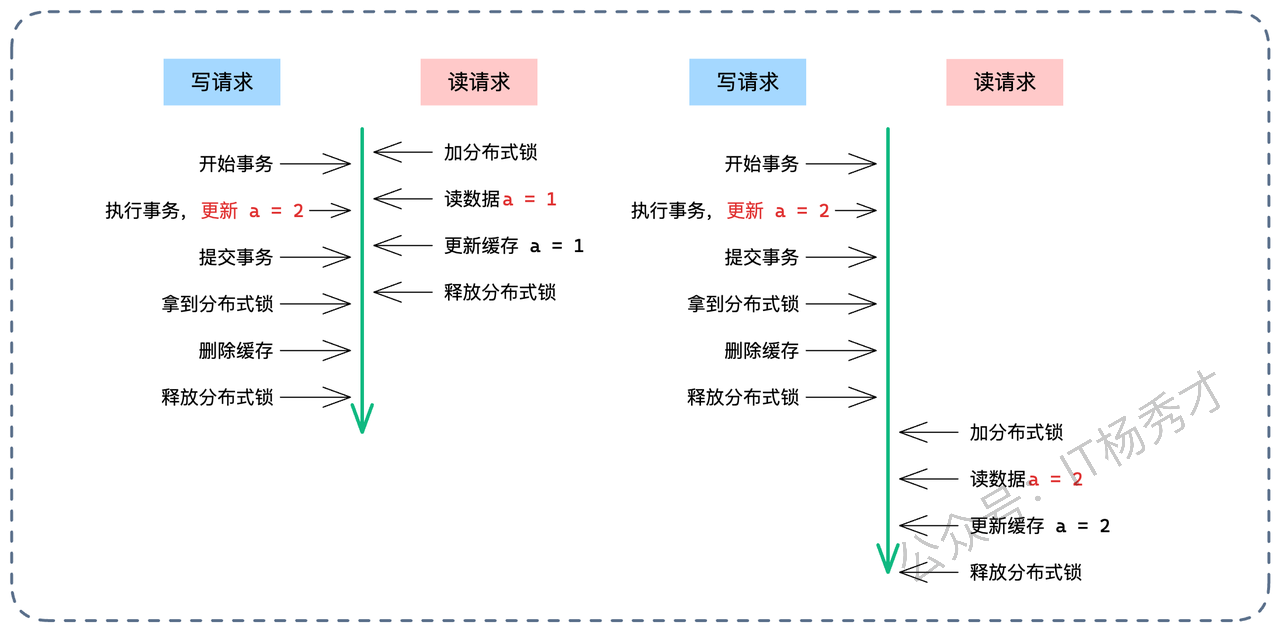
这个方案看似严谨,但其实有个致命漏洞:并发读写导致的“读-写不一致”。 也就是我们常说的“Cache Aside 模式的并发缺陷”。请看下图推演:
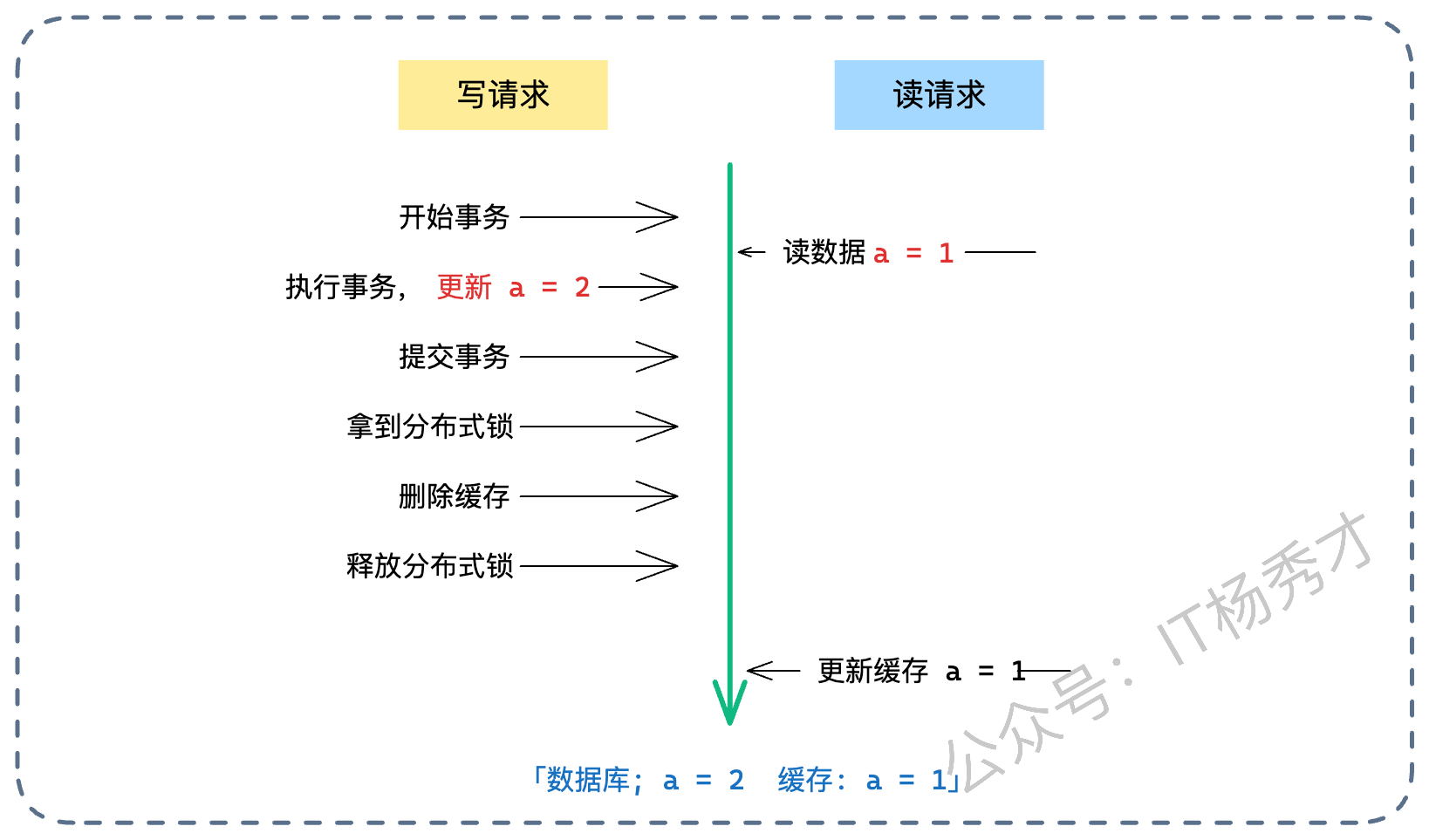
读请求:发现缓存没了,去查库。注意,此时写请求的事务还没提交,读请求读到的是旧值。
写请求:提交事务,更新了库(新值)。
写请求:获取分布式锁,删除了缓存(虽然此时缓存本来就是空的,删了个寂寞)。释放锁。
读请求:这时候才慢吞吞地把自己刚才读到的旧值写回缓存。
结果:数据库是新值,缓存是旧值。而且因为写请求已经删过缓存了,这个脏数据会一直存在,直到过期。
为了补这个漏洞,我们需要在读请求回查数据库的阶段,也加上分布式锁,形成互斥。
优化后的读请求逻辑:
读缓存,Miss。
加分布式锁。
再读一次缓存(Double-Check):这一步至关重要!因为在我不加锁的时候,可能别人已经把数据加载进去了。
如果还是没有,读库。
写缓存。
释放锁。
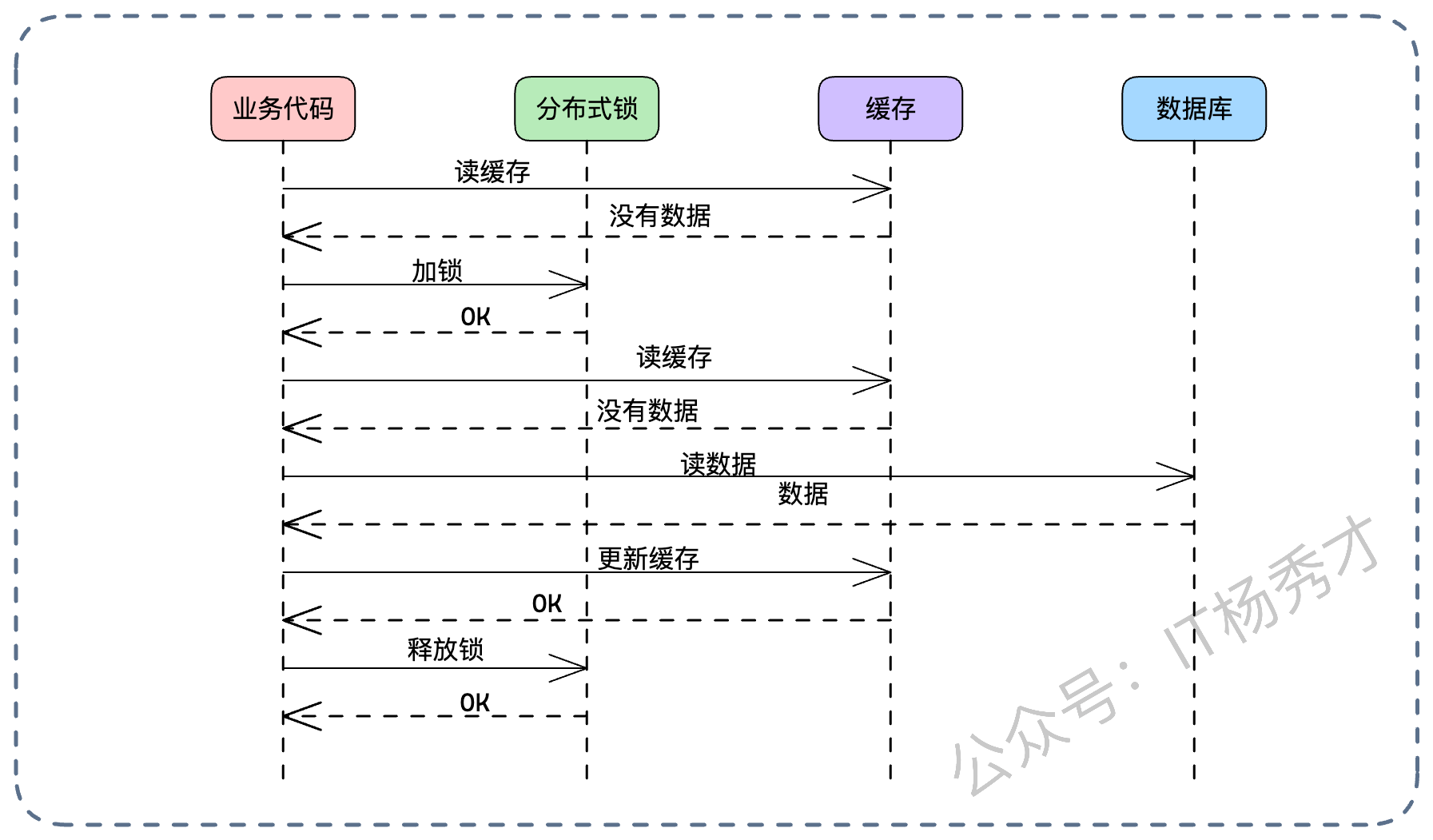
利用 Double-Check 机制,我们最大程度减少了加锁对读性能的影响。只有在缓存真正击穿的时候,才需要排队。
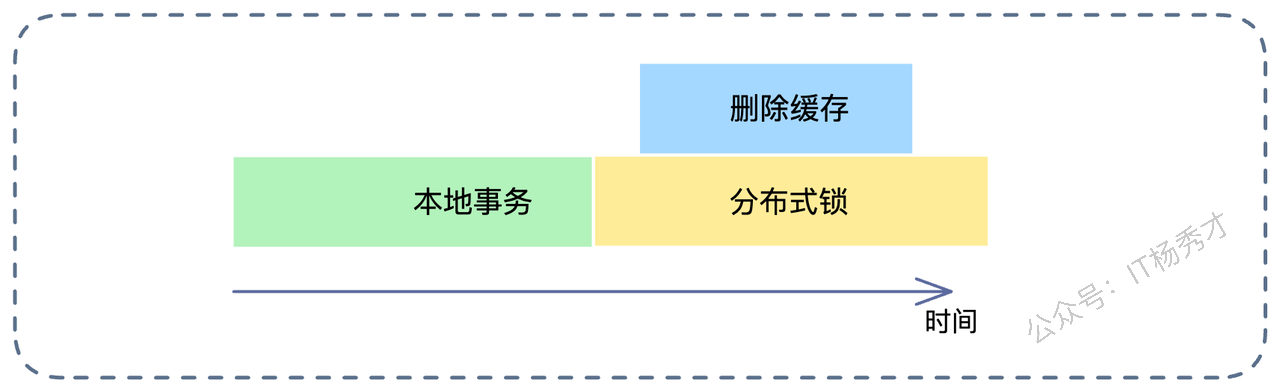
6.2.2 先删缓存,再提交
这是一种更激进的思路,试图在数据库事务提交前就搞定缓存,从而达成一种“近似强一致”的效果。
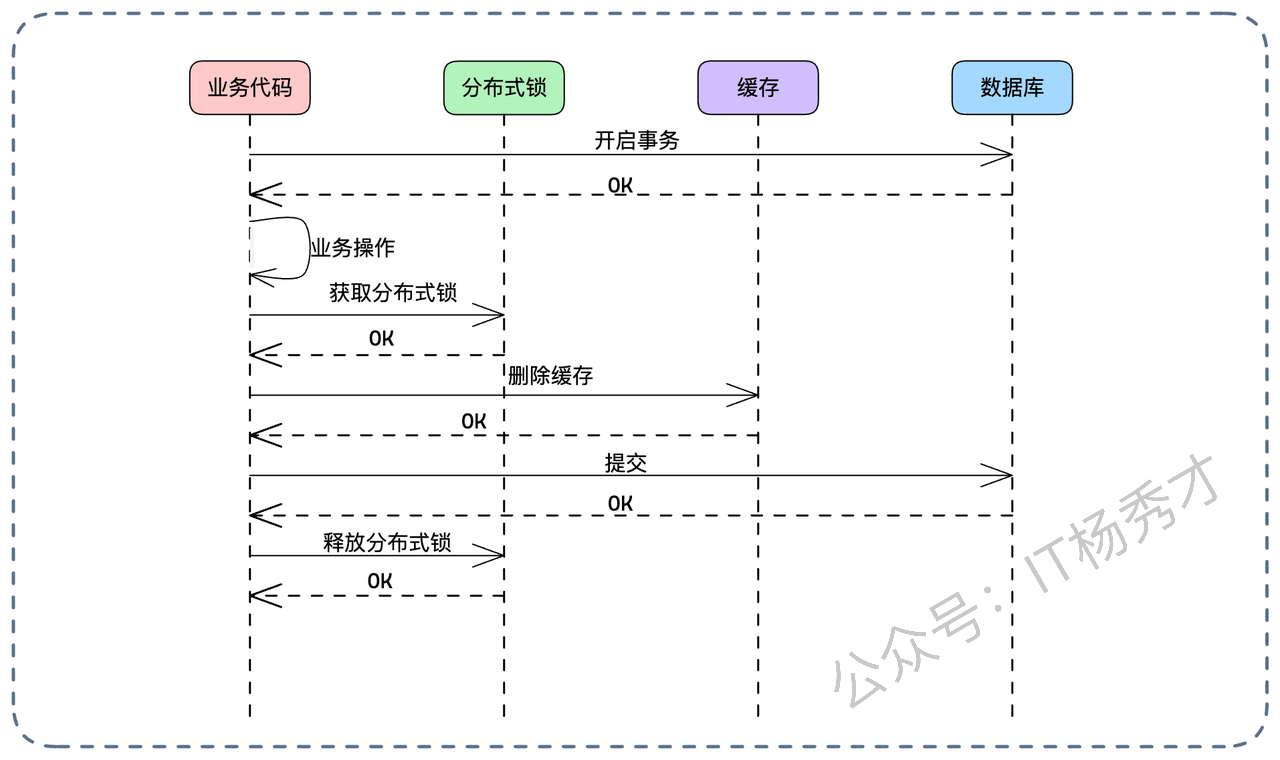
流程如下:
开启本地事务。
执行业务逻辑(Update DB)。
获取分布式锁。
删除缓存。
提交本地事务。
释放分布式锁。
为什么说它接近强一致?我们来推演各种失败场景:
- Case 1:删除缓存失败。没关系,分布式锁还没释放,事务也没提交。直接回滚事务。数据库和缓存都没变,一致。
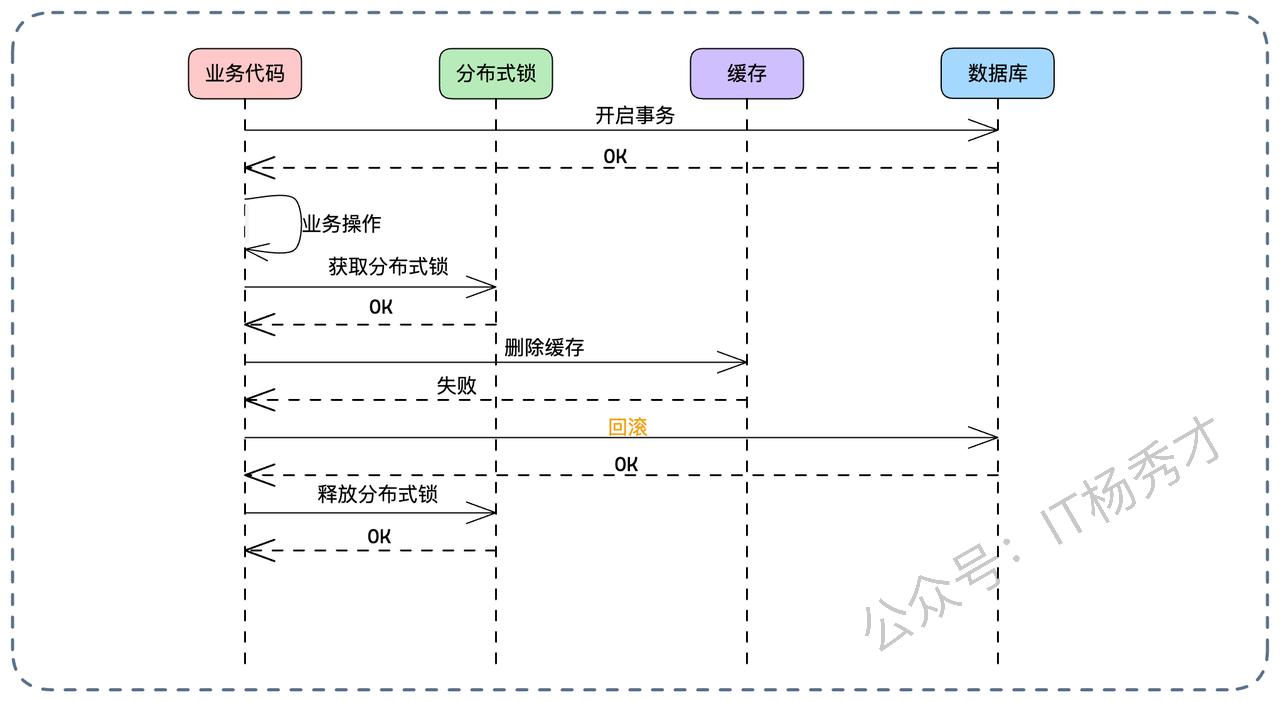
- Case 2:删除缓存成功,但事务提交失败。缓存没了,数据库没变(回滚了)。下一次读请求进来,发现缓存空了,去查库(查到旧值),回填缓存。数据依然一致(只是多了一次 Cache Miss,无伤大雅)。
只要满足以下两个条件,这个方案就是强一致的:
分布式锁本身是可靠的(互斥性)。
删除缓存的操作通过重试机制保证最终成功(防止删了一半网络断了)。
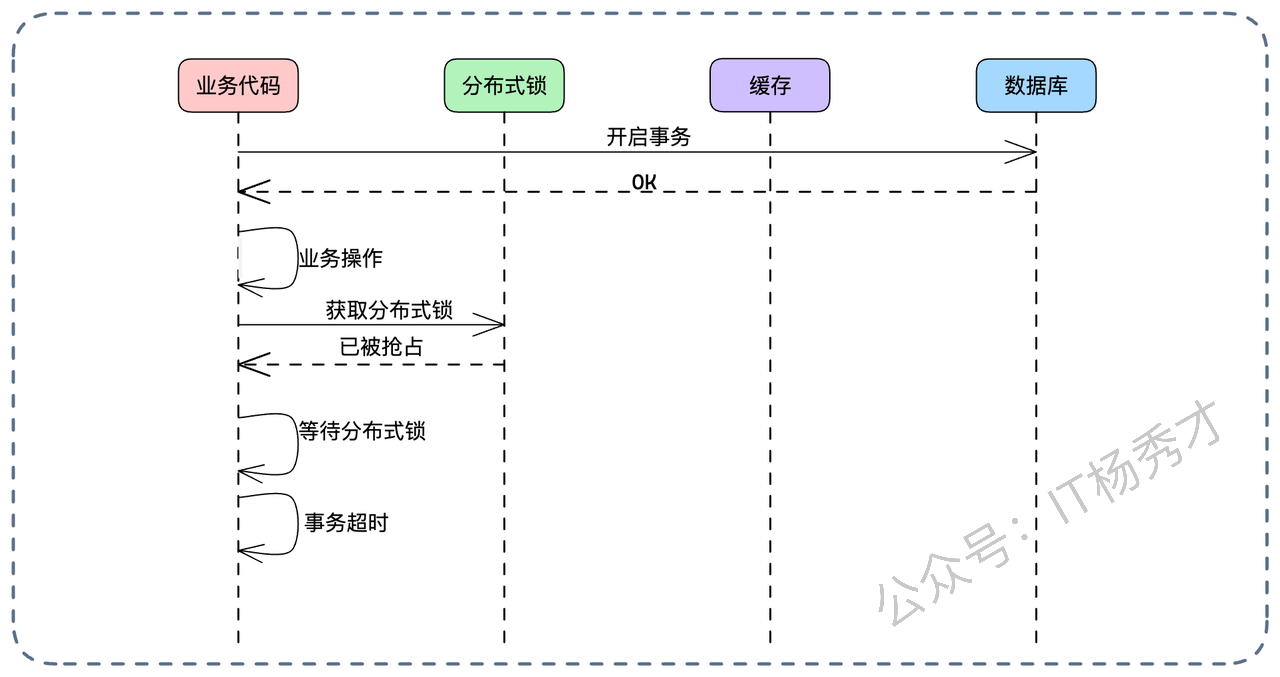
核心风险点: 这个方案最大的敌人是超时。 我们在数据库事务的内部,持有了分布式锁,并进行了网络调用(删缓存)。 如果分布式锁被别人抢占了,当前线程就要等待;或者删除缓存的网络请求卡住了。这都会导致本地事务持有时间过长。 长事务是数据库的大忌,会导致连接池耗尽、锁竞争加剧,甚至引发大规模的超时回滚。
优化变种: 为了缓解事务超时,可以把“获取分布式锁”这一步提到事务外面:
获取分布式锁(先占坑)。
开启本地事务 -> 执行 -> 删缓存 -> 提交。
释放分布式锁。
但这又导致了分布式锁的持有时间变长,影响了系统的并发吞吐量。所以,这依然是一个在“一致性”和“性能”之间走钢丝的方案,需要架构师根据具体的业务并发量来权衡。
7. 小结
回顾我们的缓存一致性方案设计之旅,一路从微观的 Double-Check 的代码实现,再到分布式锁编排的宏观架构。
基础:Double-Check 是并发优化的万金油,理解它才能理解后续的优化。
根源:一切不一致都源于“部分失败”和“并发乱序”。前者靠补偿,后者靠序列化。
常规解法:消息队列(要当信号用)、版本号(乐观锁)是解决并发的利器。
高级解法:一致性哈希结合 Singleflight 可以降维打击;而分布式锁的不同加锁顺序,则是在“数据准确性”和“系统可用性”之间做极限拉扯。
最后,还是那句话: 架构设计没有银弹。 不要试图寻找一个既简单、又高性能、还能保证强一致的方案。架构设计永远是做选择题,而不是填空题。你要做的,是在业务允许的范围内,选择那个代价最小的方案。希望这篇文章能帮你打通缓存一致性的任督二脉,在下一次架构面试中,面对面试官的刁钻提问,你能从容不迫,侃侃而谈!