13. GMP调度原理
聊到Go语言,大家最津津乐道的可能就是它那"天生强大"的并发能力了。一个简单的 go 关键字,就能开启一个并发执行单元,这酸爽,谁用谁知道。但是,你有没有想过,这背后到底藏着什么样的魔法?为什么Go的并发可以如此轻盈、如此高效?
答案,就藏在它核心的 GMP调度模型里。
很多Gopher对GMP可能只是略知一二,知道有G、M、P这三个角色,但它们之间是如何协作的,一个goroutine又是如何被创建、调度、甚至是被"抢占"的,可能就有点模糊了。
不怕!今天,就带着大家把GMP这块硬骨头彻底啃下来。咱们不光要搞懂理论,还要深入v1.19的源码,把它的底层设计看个底朝天。这篇文章会分成两大部分,从宏观到微观,带你彻底搞懂Go语言的设计精髓,GMP调度。
第一部分:宏观视角
第一小节:从基础聊起:咱们先热个身,聊聊线程、协程这些基本概念,看看Go的goroutine是如何站在巨人肩膀上的。
第二小节:GMP设计图纸:直接上源码,看看G、M、P这三个核心组件在底层到底长啥样。
第二部分:微观之旅
第三小节:一个G的诞生与执行:跟着一个goroutine的视角,看它是如何被创建并被调度器翻牌子执行的。
第四小节:G的主动让贤:看看一个正在运行的goroutine是如何主动让出CPU,把机会留给其他G的。
第五小节:霸道的调度器:当一个G"占着茅坑不拉屎",长期占用CPU时,我们的监控者是如何强制把它"请"下来的。
1. 故事的开始:了解基础概念
1.1 从线程到协程
在聊GMP之前,我们得先搞明白两个老朋友:线程(Thread) 和 协程(Coroutine)。
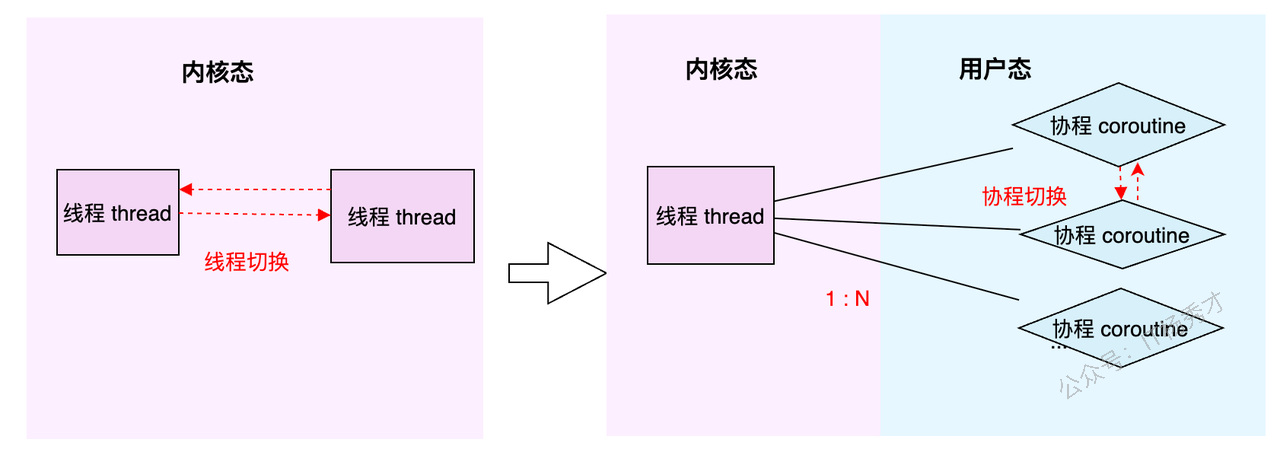
线程(Thread):这家伙是操作系统的大内总管——内核(Kernel)眼里的最小执行单元。它的生老病死、工作调度,全得听内核的号令。你可以把它想象成一个正式工,有编制,但每次调度(切换)都得走一套复杂的流程,成本比较高。
协程(Coroutine):这家伙更像是用户自己请的临时工。它活在用户态,比线程更轻量,可以理解为用户态线程。多个协程可以在一个线程上跑,它们的调度切换由用户程序自己说了算,不用去麻烦内核这个大忙人。所以,协程的切换开销极小,非常灵活。
简单总结一下:线程是内核级的,重而稳;协程是用户级的,轻而快。
1.2 Go的答案:goroutine
Go语言选择的并发实现,就是我们所熟知的 goroutine。你可以把它看作是Go对协程的"超级魔改版"。它并不是一个孤立的概念,而是整个 GMP调度体系 的核心产物。
正是因为有了GMP这套精妙的架构,goroutine才拥有了超越原生协程的两大核心优势:
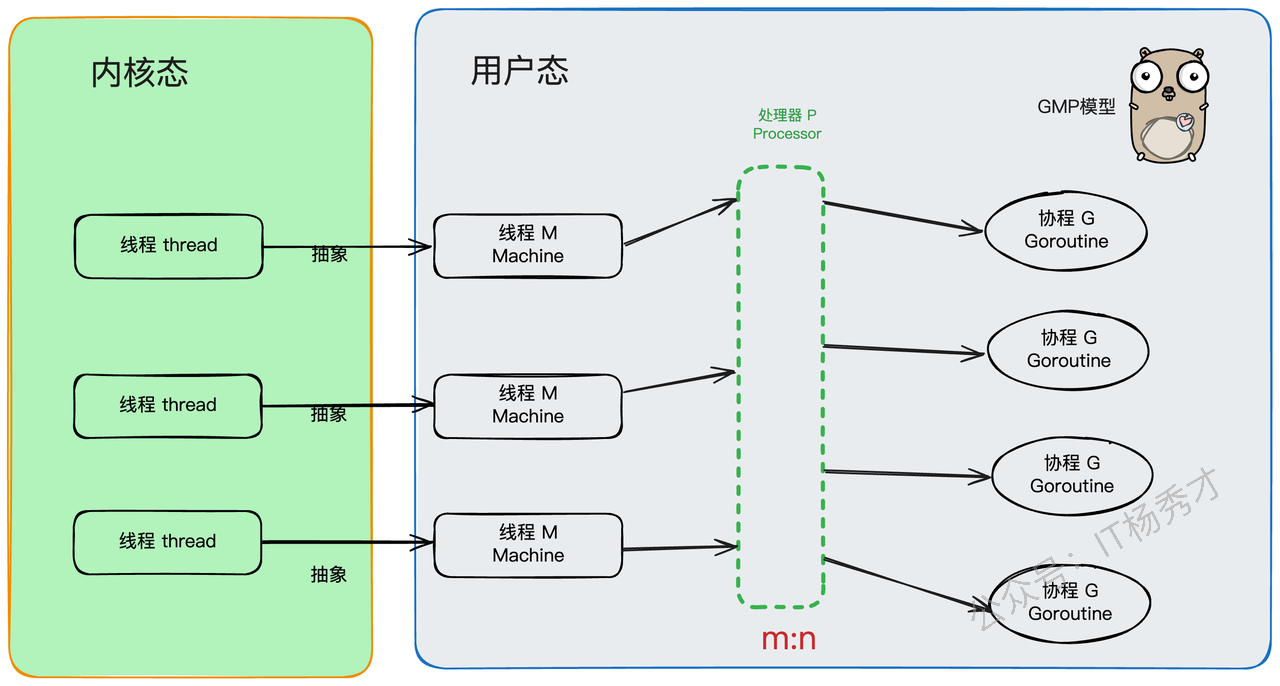
灵活的调度:G(goroutine)、M(Machine,内核线程)、P(Processor,处理器)三者之间可以动态地绑定和解绑,整个调度过程充满了弹性。
动态的栈空间:每个goroutine的栈空间可以根据需要自动伸缩,既方便使用,又极大地节约了内存资源。
更牛的是,Go语言在顶层完全屏蔽了线程这个概念,所有的并发操作都是围绕着goroutine来的,就像秦始皇统一了度量衡,Go也用goroutine统一了并发江湖的秩序。
1.3 GMP架构全景图
好了,主角登场!GMP,顾名思义,就是 Goroutine + Machine + Processor。
G(Goroutine):就是我们的"任务单元"。它有自己的执行栈、生命状态,以及要完成的具体工作(就是你
go后面跟的那个函数)。G需要绑定到M上才能运行,你可以把M想象成G的CPU。M(Machine):你可以把它看作Go对系统线程的封装,是真正干活的"工人"。M需要和P"绑定"后,才能进入GMP的调度循环。M的工作很简单,就是在
g0(一个特殊的goroutine,负责调度)和普通的G之间反复横跳:执行g0时,它在找任务;执行普通G时,它在处理任务。P(Processor):P是调度器,是GMP模型中的"中枢大脑"。M必须获取到一个P,才能开始调度和执行G。P的数量决定了同一时间最多有多少个M可以处于运行状态,这个数量通常由
GOMAXPROCS环境变量决定。P还有一个非常重要的职责:它自带一个本地的goroutine队列,我们称之为 LRQ (Local Run Queue)。
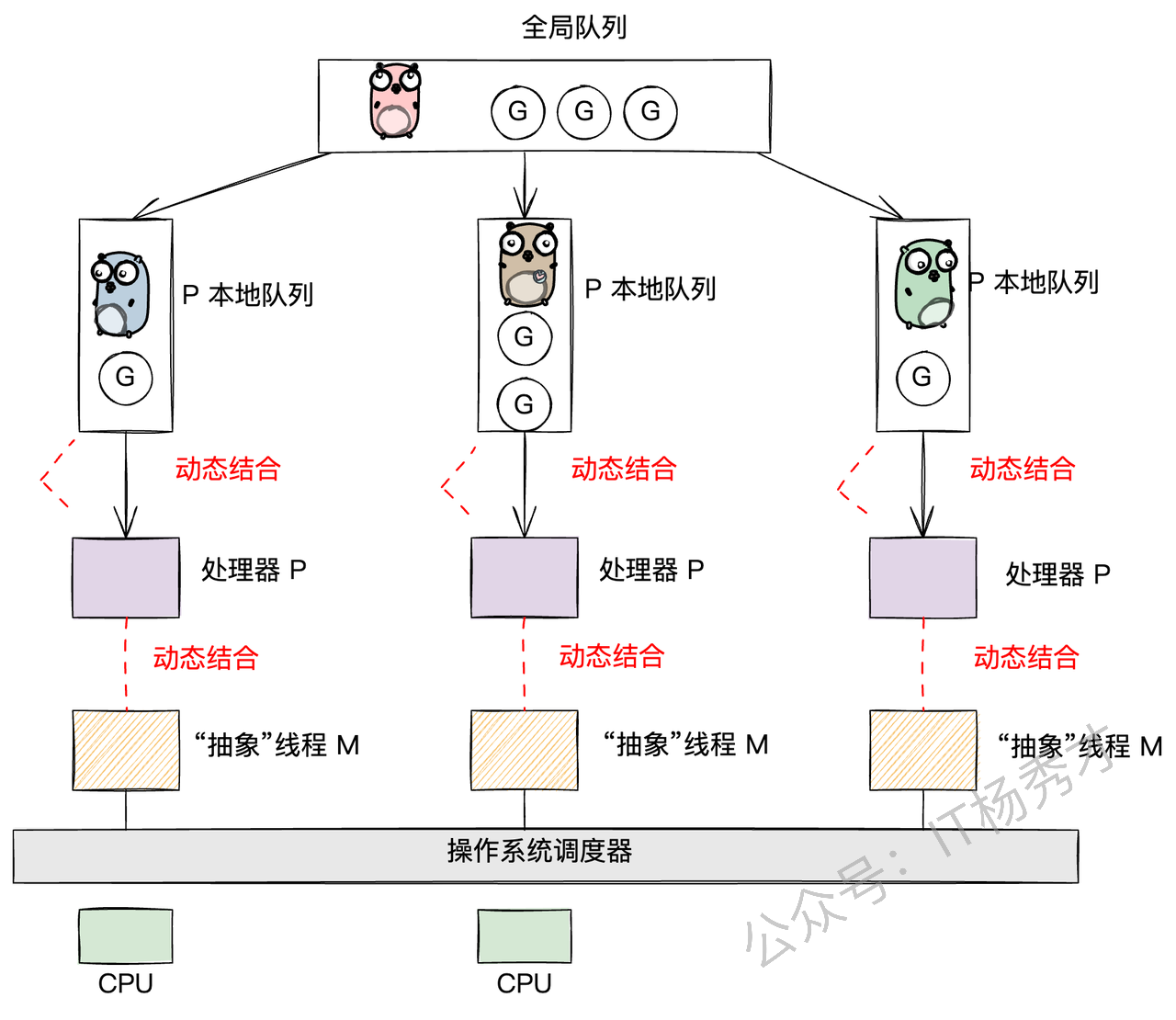
现在,我们把目光聚焦到存放G的"容器"上。Go的设计非常巧妙,它有两种队列:
P的本地队列(LRQ - Local Run Queue):这是每个P私有的G队列。当一个M想执行G时,会优先从自己绑定的P的LRQ里找。因为是私有的,所以大部分时间不需要加锁,通过高效的CAS(Compare-And-Swap)操作就能完成存取,大大减少了并发冲突。当然,也并非完全没有冲突,因为当一个P的LRQ空了的时候,它可能会从其他P的LRQ里"偷"一些G过来,这就是著名的 work-stealing 机制。
全局队列(GRQ - Global Run Queue):这是一个全局共享的G队列。当一个P的LRQ满了,新创建的G就会被放到GRQ里。因为是全局共享的,所以所有M都可能来访问,竞争激烈,因此访问它需要加一把全局大锁。
G的存放与获取逻辑:
放G(put g):当你在一个goroutine里通过
go func(){...}创建一个新的goroutine时,它会优先被放到当前P的LRQ里。如果LRQ满了,没办法,只能加个全局锁,把它扔到GRQ里去。这遵循的是"就近原则"。取G(get g):当M上的
g0开始找活干时,它会遵循一个"负载均衡"的策略,按以下顺序来寻找G:先从当前P的LRQ里找(无锁,速度最快)。
如果LRQ没有,就去全局GRQ里看看(需要加锁)。
如果GRQ也没有,就去网络轮询器(netpoll)里找找有没有因为IO操作而就绪的G。
如果还是没有,就只能去"偷"了,从别的P的LRQ里偷一半过来(work-stealing,无锁)。
这里有个小细节:为了防止GRQ里的G被"饿死"(因为M上的g0总是优先从LRQ取),调度器规定,每进行61次调度循环,就必须强制去下一次去grq取 。这样做是为了避免lrq过于繁忙,而导致grq中的g"饿死"。
1.4 GMP生态圈
在Go的世界里,GMP是绝对的基石。所有上层的建筑,比如内存管理、并发工具等,都是围绕着GMP模型来精心设计的。
1.4.1 内存管理
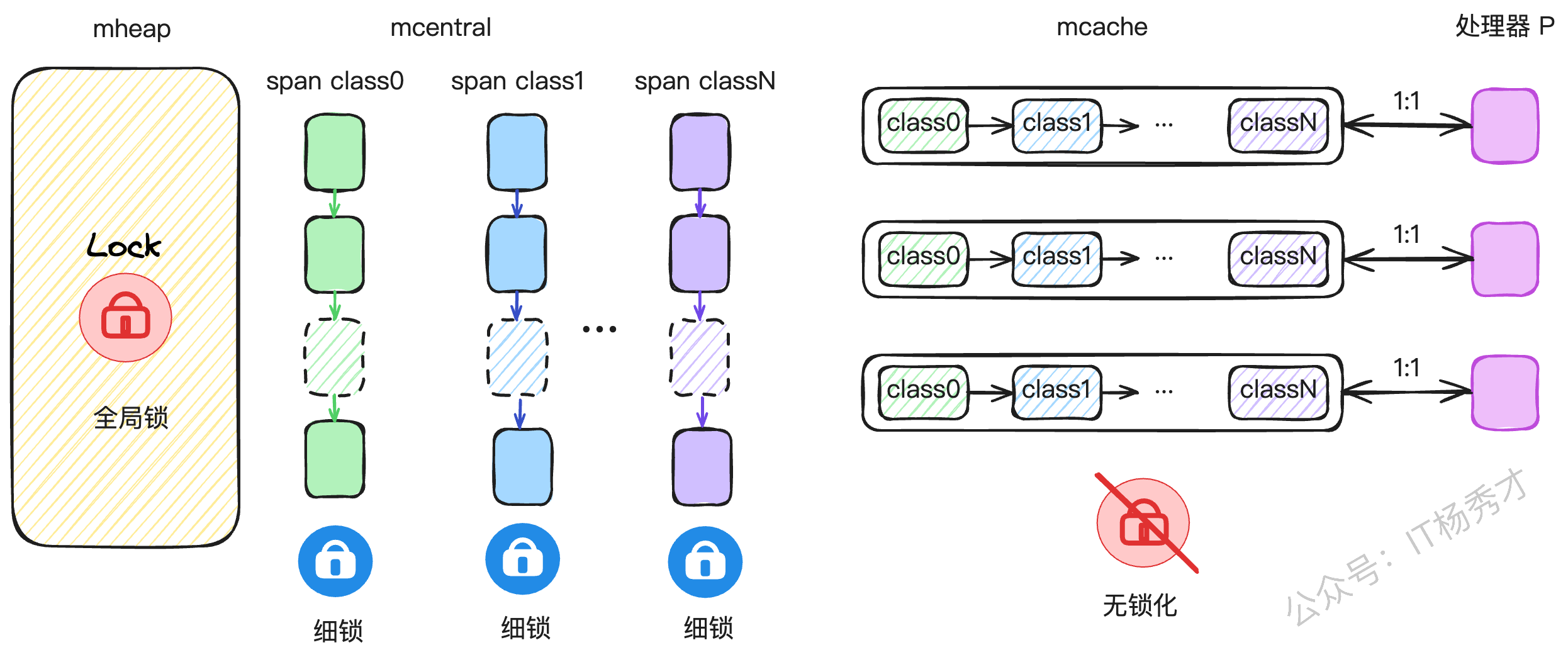
Go的内存管理借鉴了Google自家的TCMalloc思想,并为GMP模型量身定做了优化。它为每个P都配备了一个私有的内存缓存——mcache。当一个P上的G需要分配小对象时,可以直接从这个私有的mcache里拿,完全无锁,速度飞快。
1.4.2 并发工具(Mutex, Channel)
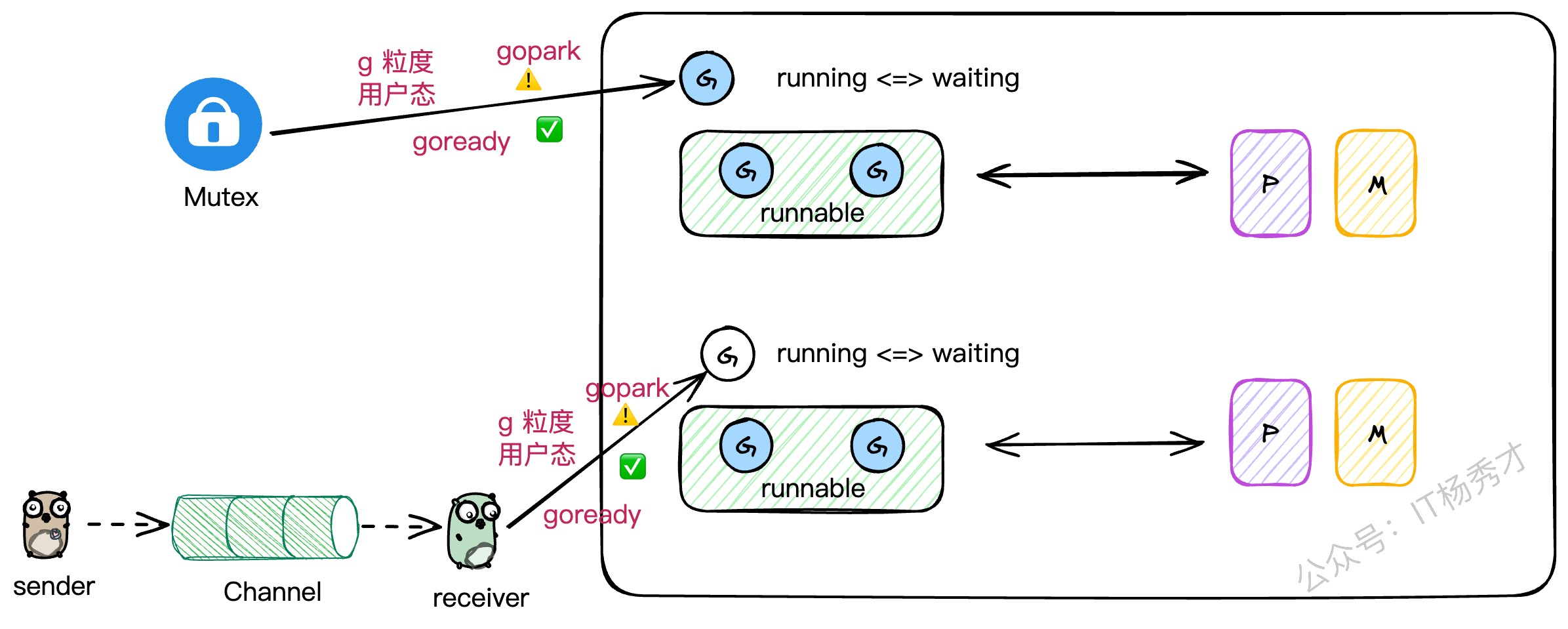
你有没有想过,为什么在Go里一个channel的读写阻塞了,或者一个Mutex锁住了,并不会把整个线程都卡死?
这就是因为Go的并发工具都是"G级别"的。当一个G因为这些操作需要阻塞时,它会被挂起,让出M的执行权。M会立刻去寻找并执行其他的G,整个过程都在用户态完成,无需内核介入。这极大地提升了并发性能。
我最近在用C++尝试模拟GMP时,就深有感触。C++标准库里的锁,一旦锁住,阻塞的是整个线程,这会导致线程上所有其他的协程都得干等着。想要实现Go这种效果,就得重写所有并发工具,成本巨大。这也反向证明了Go在并发设计上的优越性。
1.4.3 IO多路复用(netpoll)
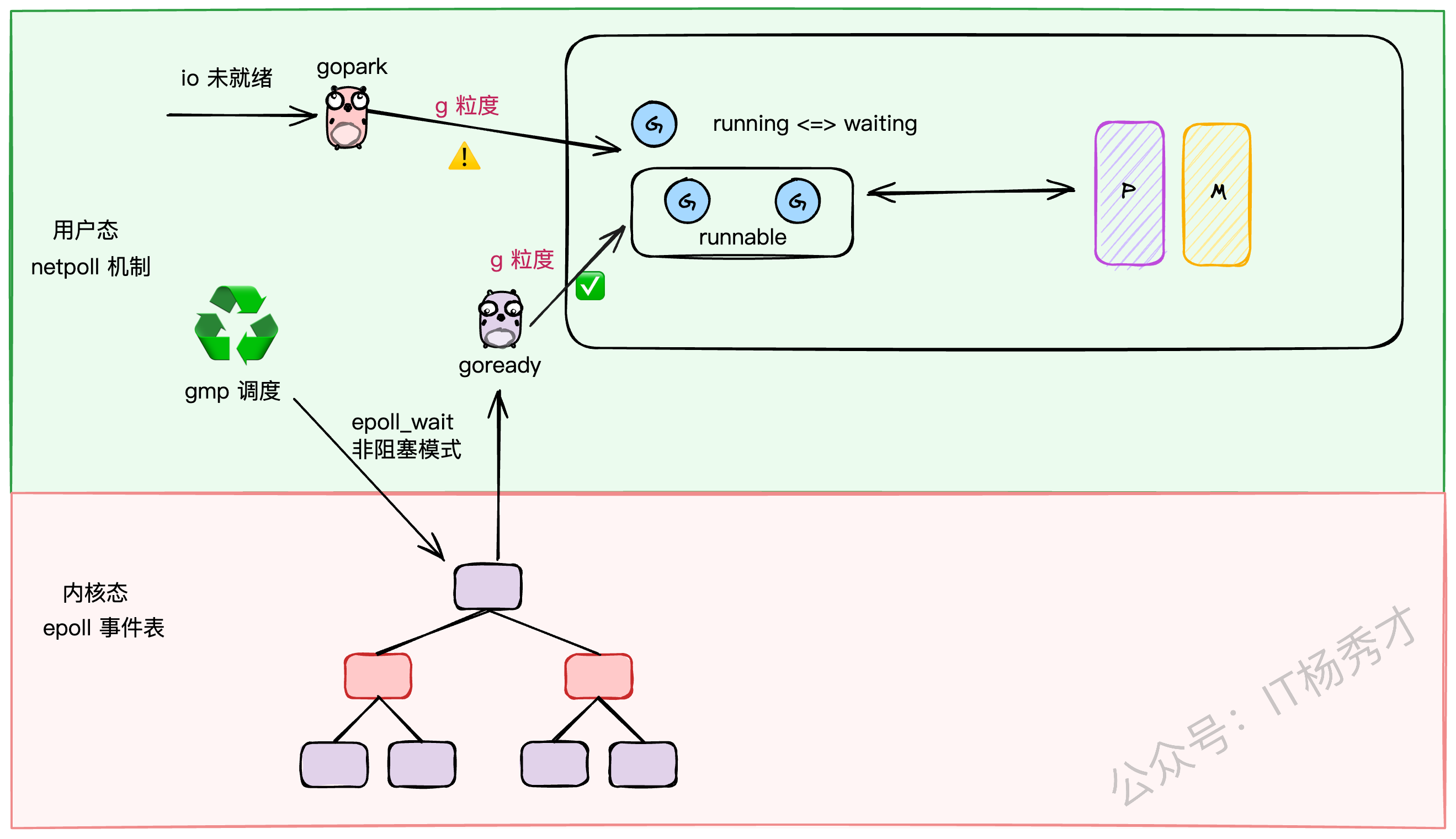
对于网络IO,Go采用了Linux下性能强悍的epoll技术。但为了避免epoll的等待操作阻塞整个M,Go设计了一套巧妙的netpoll机制。它将IO阻塞操作转换成了G级别的阻塞(gopark),当IO就绪时,再通过goready唤醒对应的G。这样,IO操作也被完美地融入了GMP的调度体系中。
可以说,不理解GMP,就无法真正理解Go语言的精髓。
2. 深入源码:GMP的底层结构
理论说了一大堆,我们现在就潜入源码,看看G、M、P在 runtime/runtime2.go 文件里到底长什么样。
2.1 G的结构(goroutine)
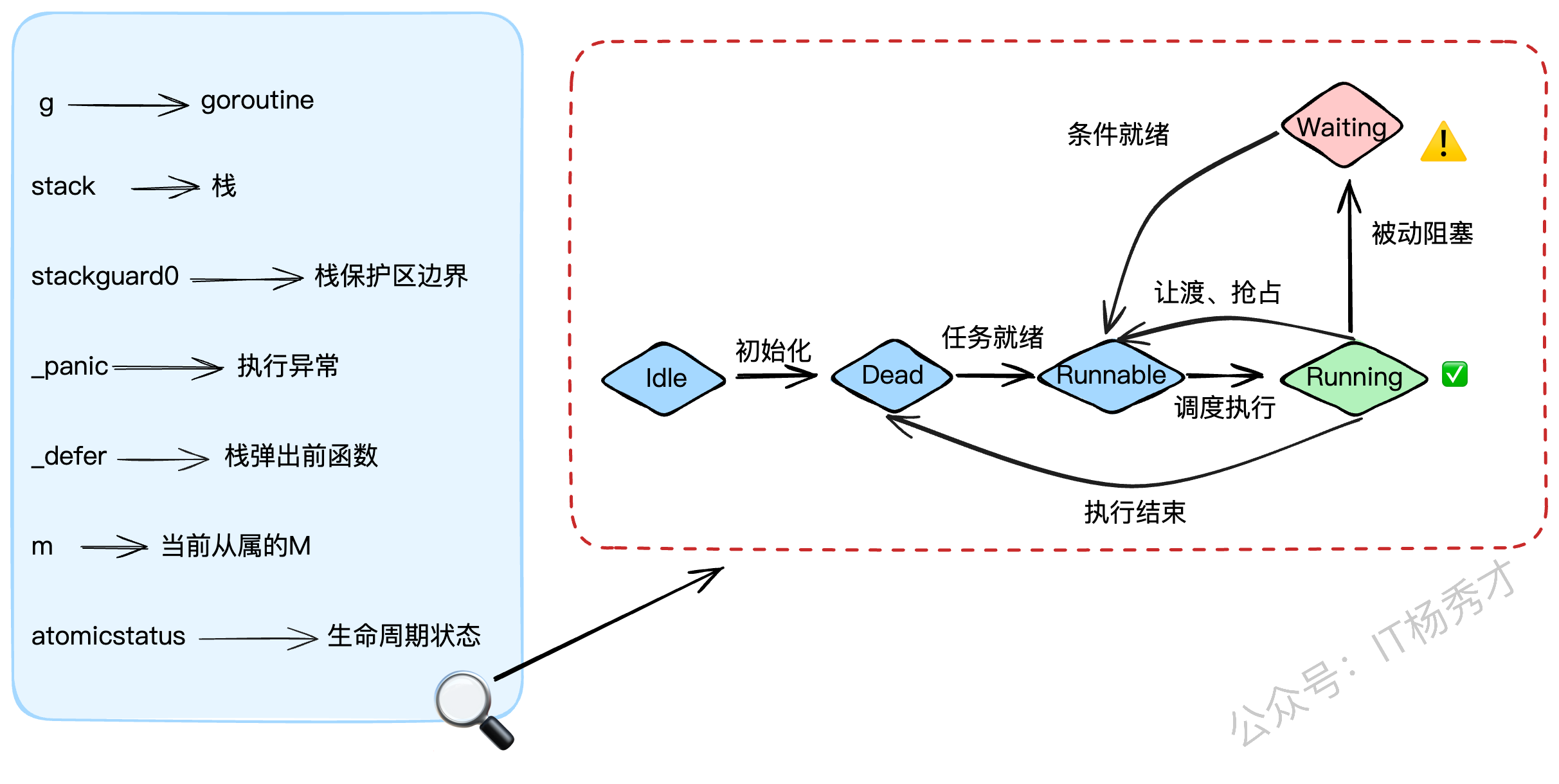
g结构体是goroutine的实体,我们来看看它的关键字段:
stack: 描述了goroutine的栈空间信息(起始和结束地址)。stackguard0: 栈的警戒线。当goroutine的栈使用量将要越过这条线时,就会触发栈扩容。同时,它也被用来标记"抢占请求"。_panic: 用来记录goroutine中发生的panic。_defer: 用链表的形式存储了goroutine中的defer操作(后进先出)。m: 指向当前正在执行它的M。如果G没在运行,这个字段就是nil。atomicstatus: G的生命周期状态,比如_Gidle、_Grunnable、_Grunning、_Gwaiting等。
// g represents a goroutine.
type g struct {
// stack describes the goroutine's stack. The bounds are
// [stack.lo, stack.hi).
stack stack // goroutine的执行栈空间
// stackguard0 is the stack pointer compared in the Go stack growth prologue.
// It is stack.lo + _StackGuard.
// It is also used to signal a request to preempt the goroutine.
stackguard0 uintptr // 栈空间保护区边界,也用于传递抢占标识
// ...
_panic *_panic // 记录g执行过程中遇到的异常
_defer *_defer // g中挂载的defer函数,是一个LIFO的链表结构
m *m // 当前执行本g的m
// atomicstatus is the status of the goroutine.
// It is changed atomically with casgstatus.
// This field is read and written atomically, and the values are not in the
// GStatus enum.
atomicstatus uint32 // g的状态
// ...
// schedlink is a link in the global run queue, idle g list, or gfree list.
schedlink guintptr // 进入全局队列grq时指向相邻g的next指针
}2.2 M的结构(Machine)
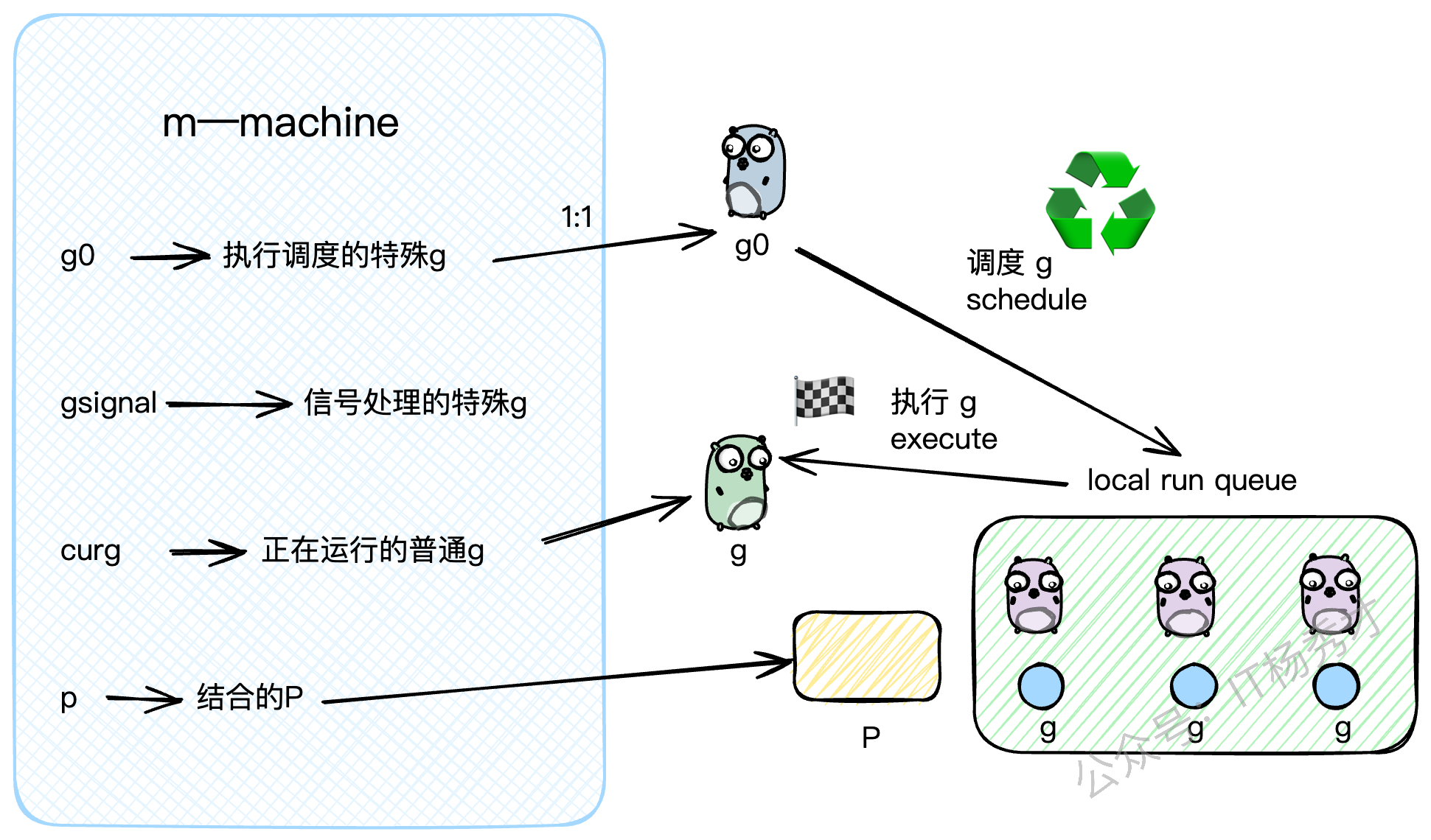
m结构体是内核线程的抽象,核心字段如下:
g0: 一个非常特殊的G。每个M都有一个自己的g0,这个g0不执行用户代码,它的任务就是执行调度逻辑,为M寻找下一个要运行的普通G。gsignal: 另一个特殊的G,专门用来处理分配给这个M的信号。curg: 指向当前M上正在运行的那个普通的用户G。p: 指向当前与M绑定的P。
// m represents an OS thread.
type m struct {
g0 *g // 专门用于调度的g,每个M都有一个
// ...
procid uint64 // M的唯一ID
gsignal *g // 用于处理信号的g
curg *g // M上正在运行的普通g
p puintptr // M关联的p
// ...
schedlink muintptr // M在空闲链表中的下一个M
}你可以把M的运行过程想象成两个状态的切换:当它在执行 g0 时,它在扮演"调度者"的角色;当它在执行 curg 时,它在扮演"执行者"的角色。
2.3 P的结构(Processor)
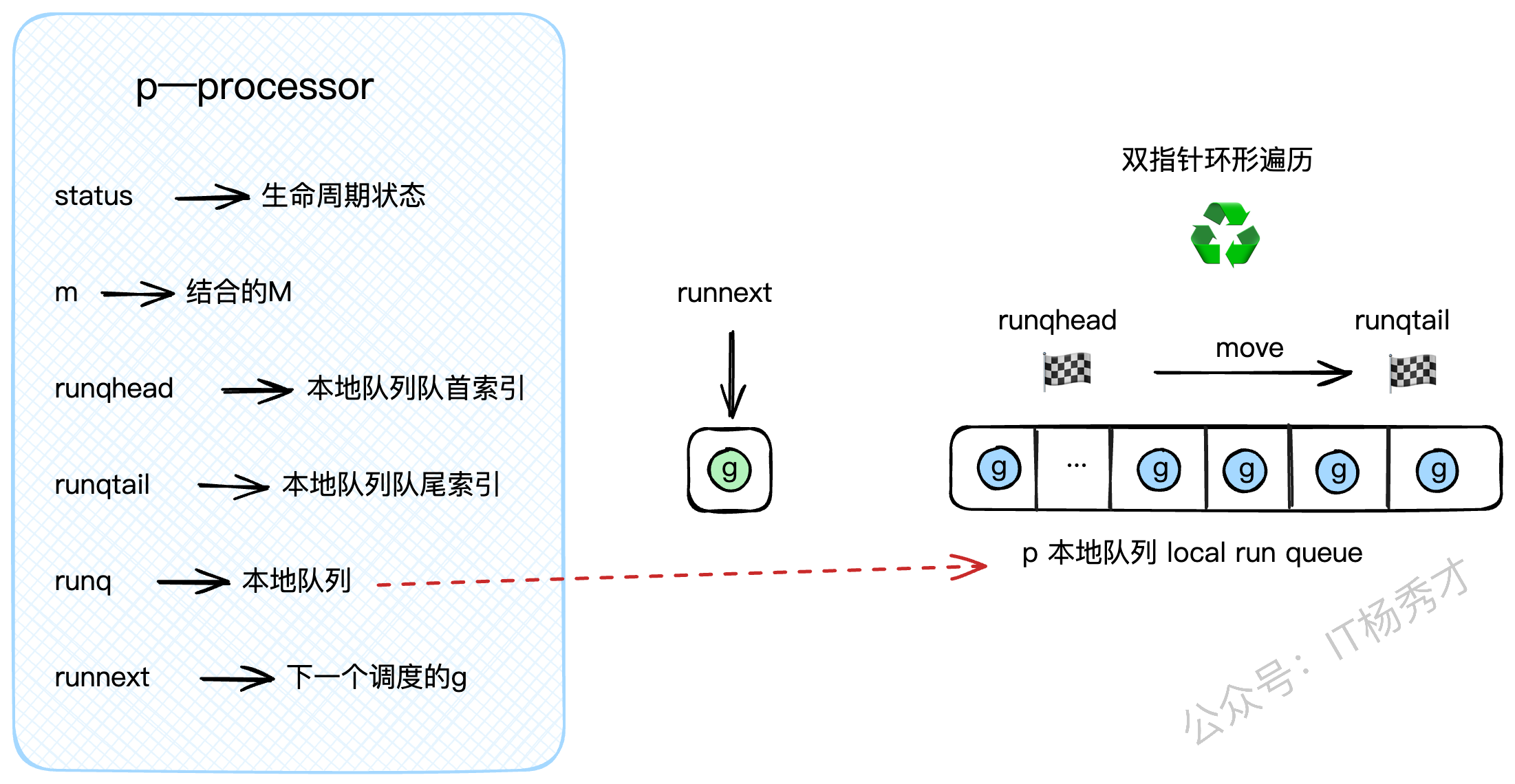
p结构体是调度器,是连接G和M的桥梁,核心字段如下:
status: P的生命周期状态,如_Pidle、_Prunning等。m: 指向当前与它绑定的M。runq: P的私有G队列,也就是我们前面说的LRQ,它是一个定长的数组,可以存放256个G。runqhead,runqtail: LRQ的头尾索引,用来实现一个环形队列。runnext: LRQ里的一个"VIP通道"。通过runqput放入的下一个G会优先放在这里,调度器会首先检查runnext是否有G,有的话直接拿来执行,可以省去操作runq队列的开销。
// p represents a processor.
type p struct {
id int32 // P的ID
status uint32 // P的状态 (pidle, prunning, etc.)
link puintptr
schedtick uint32 // 每执行一次schedule,该值+1
syscalltick uint32 // 每进行一次系统调用,该值+1
m muintptr // 回指到关联的M (如果idle则为nil)
// Queue of runnable goroutines. Accessed without lock.
runqhead uint32
runqtail uint32
runq [256]guintptr // 本地G队列,即LRQ
// runnext, if non-nil, is a runnable G that was ready'd by
// the current G and should be run next instead of what's in
// runq.
runnext guintptr // 下一个要调度的G,可以看作是LRQ中的一个特权位置
// ...
}2.4 全局调度器(schedt)
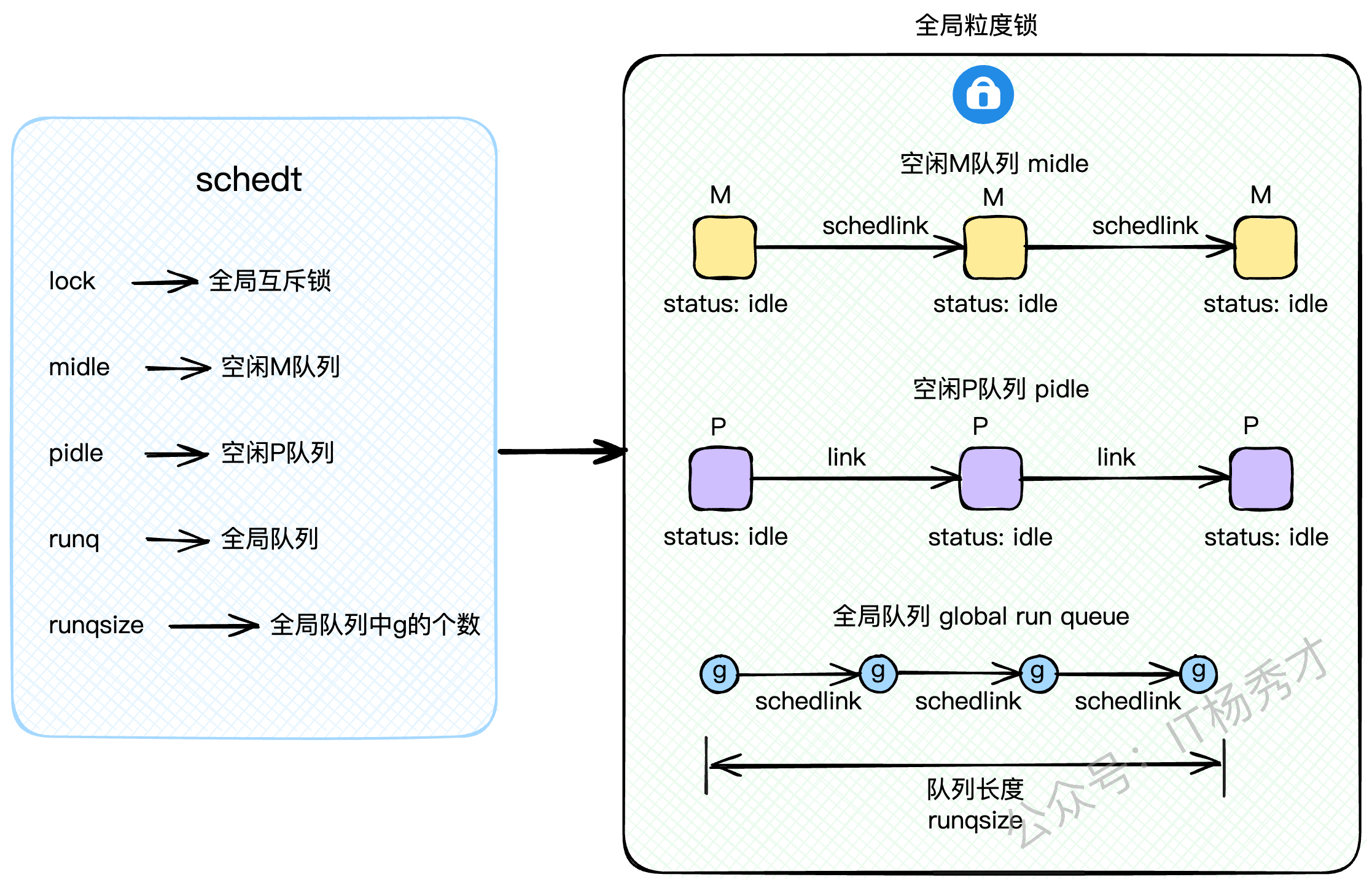
除了G、M、P这三大组件,还有一个全局的 schedt 结构体,它掌管着全局资源,访问它需要加锁。
lock: 全局互斥锁。midle: 空闲的M队列,没活干的M会在这里排队。pidle: 空闲的P队列,没活干的P也在这里排队。runq: 全局G队列,也就是GRQ。runqsize: GRQ里G的数量。
// 全局调度模块
type schedt struct{
// ...
// 互斥锁
lock mutex
// 空闲 m 队列
midle muintptr // idle m's waiting for work
// ...
// 空闲 p 队列
pidle puintptr // idle p's
// ...
// 全局 g 队列——grq
runq gQueue
// grq 中存量 g 的个数
runqsize int32
// ...
}
midle和pidle`的设计是为了资源的复用和节能。当系统不忙时,空闲的M和P会被放进这两个队列里"休眠",避免CPU空转,等到有新任务时再被唤醒。
3. 正向追踪:一个G的诞生与调度
好了,基础结构我们都看完了。现在,让我们切换到第一人称视角,看看一个我们用 go func(){...} 创建的goroutine,是如何一步步被调度并执行的。这个过程,可以看作是从 g0到 g的转换。
3.1 main函数的特殊性
main函数是所有Go程序的入口,它比较特殊。它是由一个全局唯一的 m0(主线程)来执行的。源码位于 runtime.proc.go
// The main goroutine.
func main() {
// ...
// 获取用户定义的 main.main 函数
fn := main_main
// 执行用户的 main 函数
fn()
// ...
}3.2 普通G的创建之旅
除了main这个特例,我们自己启动的goroutine都会经历一个标准的创建流程。比如这段代码:
func handle() {
// 异步启动一个goroutine
go func() {
// do something ...
}()
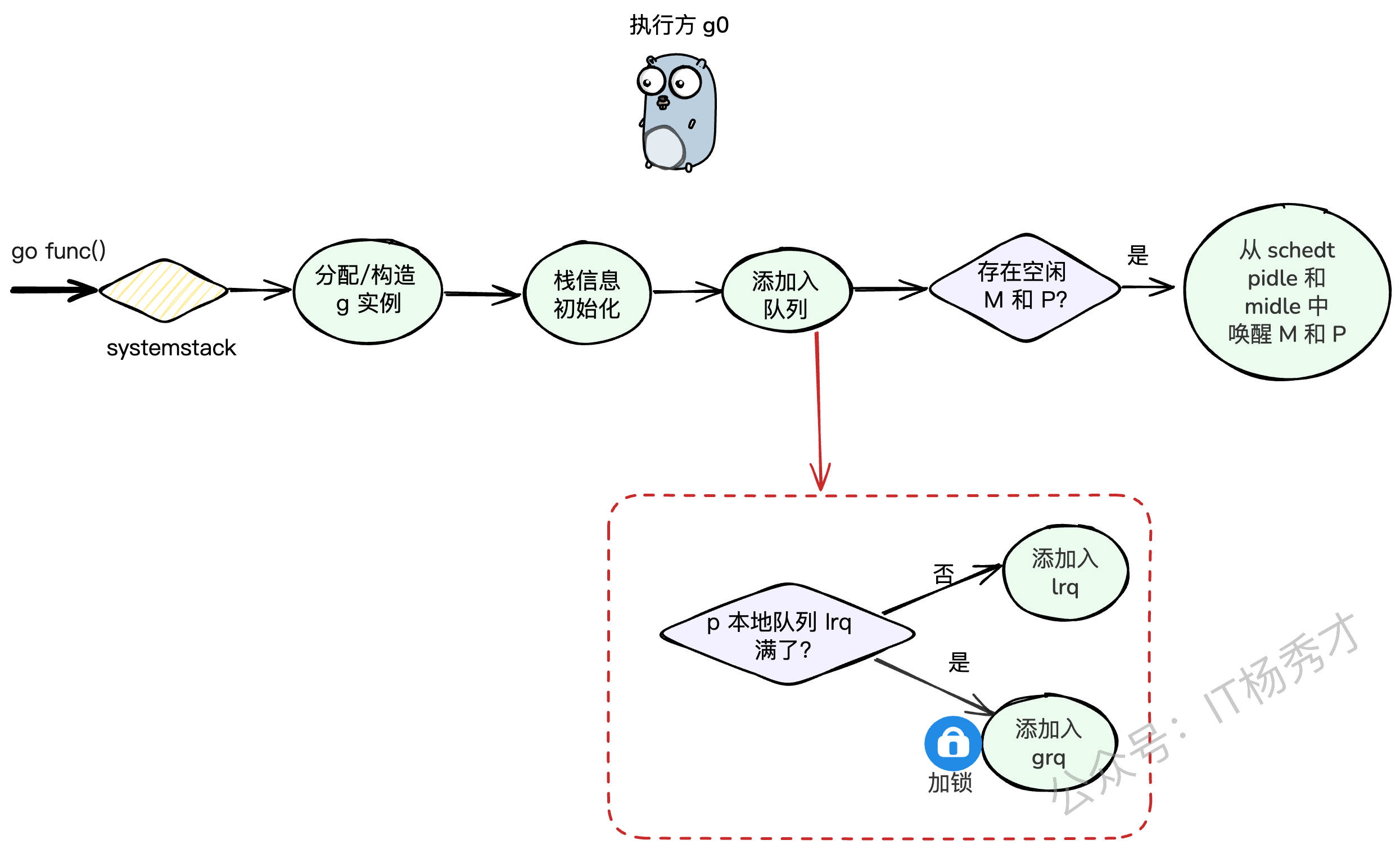
}编译器会把 go func() 转换成对 runtime.newproc 函数的调用。这个函数的核心逻辑如下(我们跟着代码走一遍):
切换到
g0栈:newproc会先通过systemstack把自己从当前的用户G栈切换到M的g0调度栈上。因为创建G是调度层面的工作,得由专业的g0来干。创建G实例:在
g0栈上,调用newproc1来创建一个新的g结构体实例,并做好初始化工作,比如设置好要执行的函数入口地址、程序计数器等。放入就绪队列:新创建的G需要被放到一个就绪队列里,等待被调度。这里会调用
runqput函数。runqput的逻辑:它会优先尝试把新的G放到当前P的
runnext这个VIP位置。如果
runnext被占了,它会尝试把G放到当前P的LRQ的队尾。如果LRQ也满了,那没办法,只能加个全局锁,把这个G和LRQ里的一半G都转移到全局队列GRQ里去(这个操作叫
runqputslow)。
唤醒休眠的P:如果此时有P因为没事干而处于休眠状态,
wakep函数会负责唤醒一个P来处理这个新任务。切回用户G栈:
systemstack执行完毕,切回到原来的用户G,继续执行它自己的代码。
// 创建一个新的g,并将其投递到就绪队列中。fn是用户指定的函数。
// 当前的执行者还是某个普通的g。
func newproc(fn *funcval) {
// 获取当前正在执行的普通g和程序计数器
gp := getg()
pc := getcallerpc()
// systemstack会临时切换到g0栈,执行完闭包函数后,再切回原来的普通g
systemstack(func() {
// 此时执行方为g0
// 构造一个新的g实例
newg := newproc1(fn, gp, pc)
// 获取当前P
_p_ := getg().m.p.ptr()
// 将newg添加到队列中:
// 1) 优先添加到P的本地队列LRQ
// 2) 如果LRQ满了,则添加到全局队列GRQ
runqput(_p_, newg, true)
// 如果有因为空闲而被阻塞的P和M,需要唤醒它们
if mainStarted {
wakep()
}
})
// 切回到原来的普通g继续执行
}3.3 从 g0 到 g 的切换
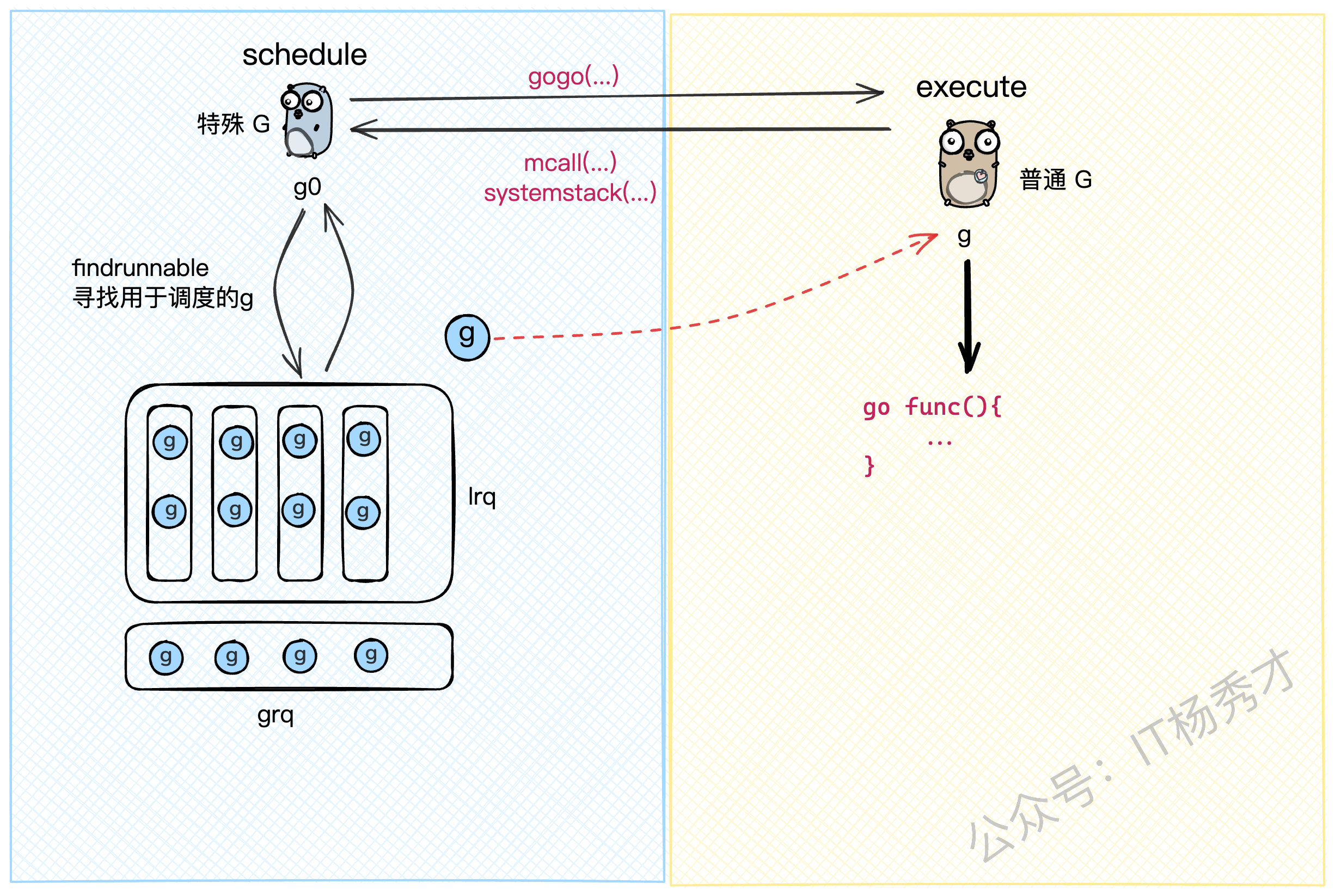
每个M都有一个自己的g0,g0的工作就是不断地调用schedule函数来寻找可执行的G。所以,一个M的生命周期,就是在执行g0(找任务)和执行普通g(做任务)之间循环往复。
这个切换过程有两个关键的"桩函数":
mcall,systemstack: 实现从g切换到g0。gogo: 实现从g0切换到g。
我们从g0的视角来看,它主要做两件事:
schedule(): 调用findrunnable()方法,从各个队列里找到一个可执行的G。execute(): 找到G之后,更新上下文信息(比如把m.curg指向找到的G),然后调用gogo,把M的CPU执行权从g0交到这个G手上。
上述方法均实现于 runtime/proc.go 文件中:
// 执行方为g0
func schedule() {
_g_ := getg() // 获取当前g0
top:
pp := _g_.m.p.ptr() // 获取当前P
// ...
// 核心方法: 获取一个可调度的g
// - 按照优先级,依次从本地队列LRQ、全局队列GRQ、netpoll、其他P的LRQ中寻找
// - 如果都找不到,就把P和M都休眠掉
gp, inheritTime, tryWakeP := findRunnable() // 这个函数会阻塞直到找到任务
// ...
// 执行g,这个方法会把执行权从g0切换到gp
execute(gp, inheritTime)
}
// 执行指定的g。当前执行方还是g0,但会通过gogo方法切换到gp
func execute(gp *g, inheritTime bool) {
_g_ := getg() // 获取g0
// 建立g0和gp的关系
_g_.m.curg = gp
gp.m = _g_.m
// 更新gp的状态:runnable -> running
casgstatus(gp, _Grunnable, _Grunning)
// 设置gp的栈保护区边界
gp.stackguard0 = gp.stack.lo + _StackGuard
// 执行gogo方法,M的执行权会切换到gp
gogo(&gp.sched)
}3.4 寻找G的漫漫长路:findrunnable
findrunnable是调度循环中最核心的函数,它寻找G的策略体现了Go调度器的智慧。
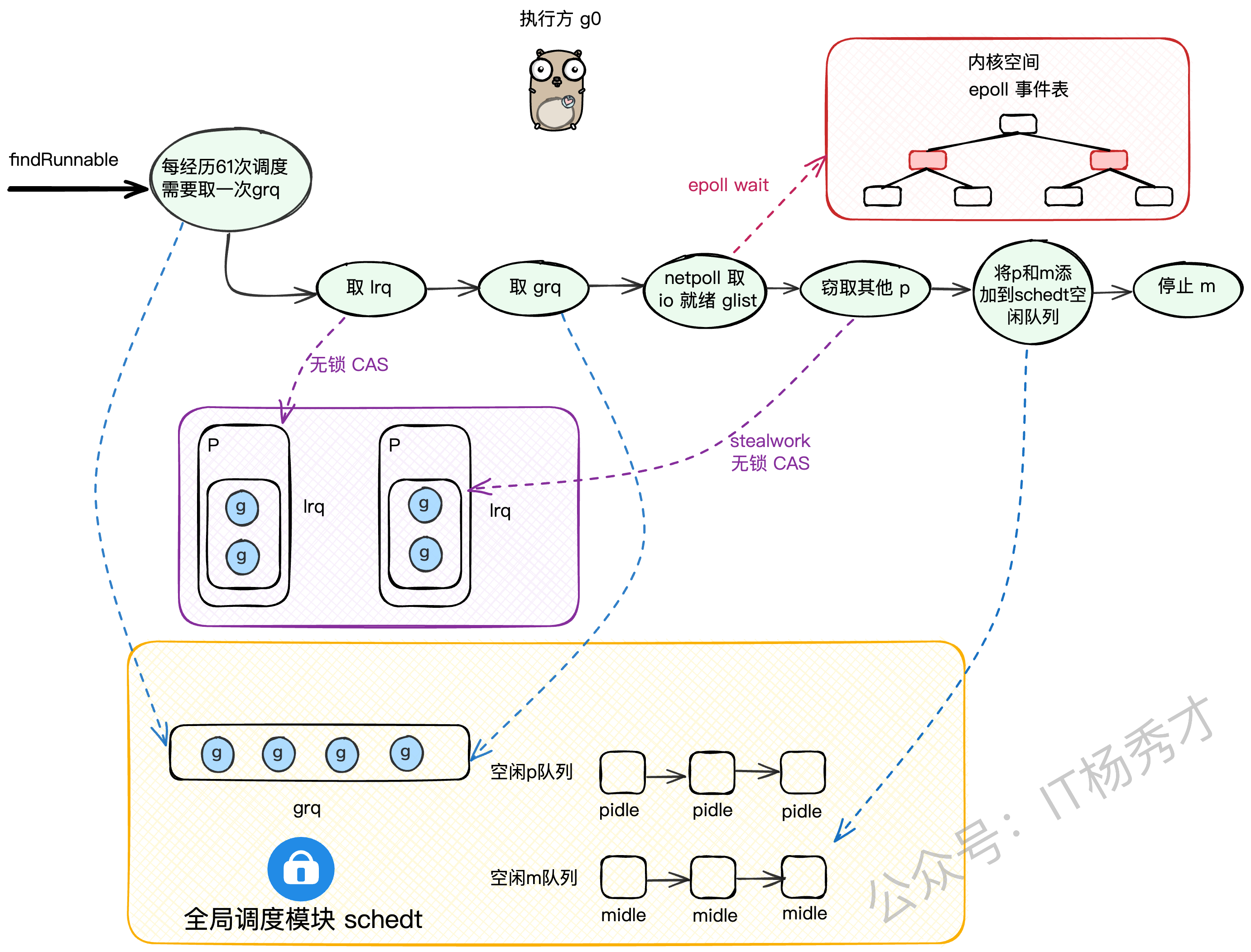
我们来梳理一下它的寻找步骤:
检查全局队列(GRQ):还记得吗?每61次调度循环,必须先从全局队列
globrunqget拿一个G,防止GRQ饥饿。(需要加锁)检查本地队列(LRQ):从当前P的LRQ里
runqget一个G。(无锁CAS)再次检查全局队列(GRQ):如果本地没有,再去全局队列里
globrunqget找。(需要加锁)检查网络轮询器(netpoll):如果还没有,就去
netpoll里看看有没有因为网络IO就绪的G。(非阻塞模式)从别的P偷(steal work):如果还找不到,就只能启动
stealwork机制,随机找一个别的P,从它的LRQ里偷一半的G过来。再次double check全局队列:偷完之后,再最后看一眼全局队列。
进入休眠:如果以上所有努力都失败了,说明系统现在真的很闲,
findrunnable会:把当前的P设置为
_Pidle状态,并把它放到全局的pidle队列里。在把当前M也休眠之前,会做最后一次挣扎:以阻塞模式调用
netpoll,看看能不能等到一个IO事件。如果连阻塞等待IO都没用,那就彻底死心了,把当前M也放到全局的
midle队列里,然后调用stopm让M休眠,交出线程控制权。
这个过程设计得非常精妙,既保证了任务获取的高效性(优先无锁操作),又实现了负载均衡(work-stealing),还能在系统空闲时自动缩容,节省资源。
3.5 findRunnable函数详解
Go调度器的核心在于findRunnable函数,这个函数负责为当前的处理器P找到一个可执行的goroutine。整个过程遵循着严格的优先级顺序,确保系统的公平性和效率。
// 寻找可执行的goroutine,返回时必定已经找到目标g
func findRunnable()(gp *g, inheritTime, tryWakeP bool){
// 获取当前P下的g0(调度协程)
_g_ := getg()
// ...
top:
// 获取当前的处理器P
_p_ := _g_.m.p.ptr()
// ...
// 防饥饿机制:每61次调度检查一次全局队列
if _p_.schedtick%61==0 && sched.runqsize > 0{
lock(&sched.lock)
gp = globrunqget(_p_, 1)
unlock(&sched.lock)
if gp != nil{
return gp, false, false
}
}
// ...
// 第一优先级:从本地运行队列获取goroutine
if gp, inheritTime := runqget(_p_); gp != nil{
return gp, inheritTime, false
}
// 第二优先级:从全局队列获取goroutine
if sched.runqsize != 0{
lock(&sched.lock)
gp := globrunqget(_p_, 0)
unlock(&sched.lock)
if gp != nil{
return gp, false, false
}
}
// 第三优先级:处理网络I/O就绪的goroutine
if netpollinited() && atomic.Load(&netpollWaiters) > 0 &&
atomic.Load64(&sched.lastpoll) != 0{
if list := netpoll(0); !list.empty(){ // 非阻塞调用
gp := list.pop()
injectglist(&list)
casgstatus(gp, _Gwaiting, _Grunnable)
// ...
return gp, false, false
}
}
// ...
// 第四优先级:从其他P的本地队列偷取goroutine
gp, inheritTime, tnow, w, newWork := stealWork(now)
if gp != nil{
return gp, inheritTime, false
}
// 若有GC标记任务,参与协作而非直接回收P
// ...
// 最后检查:再次确认全局队列
lock(&sched.lock)
// ...
if sched.runqsize != 0{
gp := globrunqget(_p_, 0)
unlock(&sched.lock)
return gp, false, false
}
// ...
// 无事可做时:解绑P和M,将P放入空闲队列
releasep()
now = pidleput(_p_, now)
unlock(&sched.lock)
// ...
// 网络轮询保障机制:确保有M专门处理I/O事件
if netpollinited() && (atomic.Load(&netpollWaiters) > 0 || pollUntil != 0) &&
atomic.Xchg64(&sched.lastpoll, 0) != 0{
atomic.Store64(&sched.pollUntil, uint64(pollUntil))
// ...
// 阻塞模式执行网络轮询
delay := int64(-1)
// ...
list := netpoll(delay) // 阻塞直到有新任务
// 恢复轮询标识
atomic.Store64(&sched.lastpoll, uint64(now))
// ...
lock(&sched.lock)
// 尝试获取空闲的P
_p_, _ = pidleget(now)
unlock(&sched.lock)
// 如果没有可用的P,将就绪的goroutine放入全局队列
if _p_ == nil{
injectglist(&list)
} else {
// 重新绑定P和M
acquirep(_p_)
// 取第一个goroutine用于调度,其余放入全局队列
if !list.empty(){
gp := list.pop()
injectglist(&list)
casgstatus(gp, _Gwaiting, _Grunnable)
// ...
return gp, false, false
}
// ...
goto top
}
}
// ...
// 最终手段:阻塞当前M,加入空闲队列
stopm()
goto top
}3.5.1 本地队列获取策略
从本地队列获取goroutine是最高效的方式,因为不需要加锁。runqget函数采用了巧妙的双重策略:
// 无锁方式从P的本地队列获取goroutine
func runqget(_p_ *p)(gp *g, inheritTime bool){
// 优先获取runnext位置的goroutine(高优先级位置)
next := _p_.runnext
if next != 0 && _p_.runnext.cas(next, 0){
return next.ptr(), true
}
// 从队列头部获取普通goroutine
for{
// 原子操作获取头部索引
h := atomic.LoadAcq(&_p_.runqhead) // load-acquire语义,与其他消费者同步
// 获取尾部索引
t := _p_.runqtail
// 队列为空的情况
if t == h {
return nil, false
}
// 根据索引取出对应的goroutine
gp := _p_.runq[h%uint32(len(_p_.runq))].ptr()
// CAS操作更新头部索引
if atomic.CasRel(&_p_.runqhead, h, h+1){ // cas-release语义,提交消费操作
return gp, false
}
}
}这里有个有趣的设计:runnext是一个特殊位置,专门存放高优先级的goroutine,比如刚刚创建的新goroutine。这样设计可以提高响应性。
3.5.2 全局队列的公平调度
当本地队列为空时,调度器会转向全局队列。但这里有个重要的防饥饿机制:
// 从全局队列获取goroutine,调用前必须持有全局锁
func globrunqget(_p_ *p, max int32)*g {
// 确保持有锁的断言检查
assertLockHeld(&sched.lock)
// 队列空检查
if sched.runqsize == 0{
return nil
}
// ...
// 根据max参数可能会批量转移goroutine到本地队列
// 这里简化显示核心逻辑
// ...
// 从全局队列头部弹出一个goroutine
gp := sched.runq.pop()
// ...
return gp
}3.5.3 网络I/O事件处理机制
在 gmp 调度流程中,如果 lrq 和 grq 都为空,则会执行 netpoll 流程,尝试以非阻塞模式下的 epoll_wait 操作获取 io 就绪的 g。该方法位于 runtime/netpoll_epoll.go:
func netpoll(delay int64) gList {
// ...
// 调用系统的epoll_wait获取就绪事件
var events [128]epollevent
n := epollwait(epfd, &events[0], int32(len(events)), waitms)
// ...
var toRun gList
for i := int32(0); i < n; i++{
ev := &events[i]
// 将就绪事件对应的goroutine加入待运行列表
netpollready(...)
}
return toRun
}这个机制让Go程序能够高效处理大量并发连接,而不需要为每个连接分配单独的线程。
3.5.4 从其他的P队列窃取g
当本地队列和全局队列都为空时,并且执行完 netpoll 流程后仍未获得 g,则会尝试从其他 p 的 lrq 中窃取半数 g 补充到当前 p 的 lrq 中。工作窃取算法是负载均衡的关键,它确保了系统中的处理器都能保持忙碌状态。
func stealWork(now int64) (gp *g, inheritTime bool, rnow, pollUntil int64, newWork bool){
// 获取当前P
pp := getg().m.p.ptr()
// ...
// 最多尝试4轮窃取
const stealTries = 4
for i := 0; i < stealTries; i++{
// ...
// 随机选择窃取目标,避免热点竞争
for enum := stealOrder.start(fastrand()); !enum.done(); enum.next(){
// ...
// 获取目标P
p2 := allp[enum.position()]
// 不能从自己这里偷
if pp == p2 {
continue
}
// ...
// 只要目标P不是空闲状态就尝试窃取
if !idlepMask.read(enum.position()){
// 窃取目标P本地队列中的一半goroutine
if gp := runqsteal(pp, p2, stealTimersOrRunNextG); gp != nil{
return gp, false, now, pollUntil, ranTimer
}
}
}
}
// 窃取失败
return nil, false, now, pollUntil, ranTimer
}3.5.5 回收空闲p和m
再执行完上述逻辑之后,如果还是未能获取到可运行的g,系统需要妥善处理空闲的P和M,此时会将 p 和 m 添加到 schedt 的 pidle 和 midle 队列中并停止 m 的运行,避免产生资源浪费
// 将P加入空闲队列
func pidleput(_p_ *p, now int64)int64{
assertLockHeld(&sched.lock)
// ...
// 将P插入空闲队列头部
_p_.link = sched.pidle
sched.pidle.set(_p_)
atomic.Xadd(&sched.npidle, 1)
// ...
}
// 停止当前M的运行
func stopm(){
_g_ := getg()
// ...
lock(&sched.lock)
// 将M加入空闲队列
mput(_g_.m)
unlock(&sched.lock)
// 让M进入休眠状态
mPark()
// ...
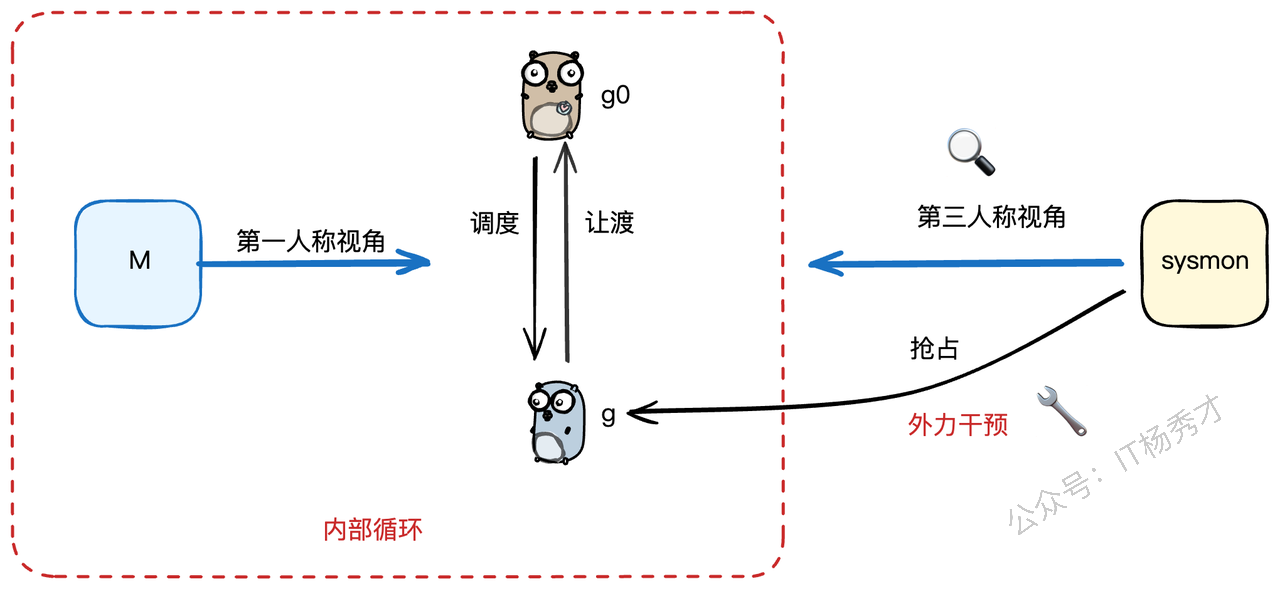
}4. 逆向追踪:G的让渡艺术
有借有还,再借不难。G拿到了M的执行权,也得在适当的时候还回去。这个"还"的过程,我们称之为让渡(yield)。让渡是一个主动的行为,由G自己发起,目的是把执行权交还给g0,让g0可以去调度其他的G。这是一个从 g 到 g0 的转换。
4.1 功成身退:执行结束
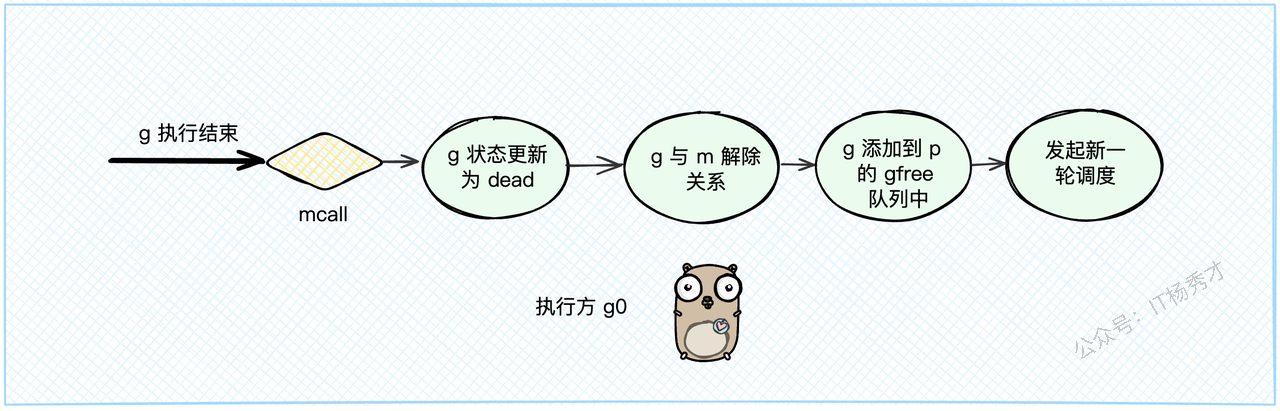
当一个G的任务执行完毕,它会调用goexit1,这是一个主动的"退休"申请。
在
goexit1里,它会调用mcall(goexit0),这个mcall指令会把执行权从当前的G切换到M的g0上,并让g0去执行goexit0函数。goexit0函数(此时由g0执行)会负责给这个退休的G办"后事":把G的状态从
_Grunning更新为_Gdead。清理G内部的数据。
解除G和M的绑定关系(
dropg)。把这个G的结构体放到P的
gfree队列里,方便下次创建新G时复用,避免了内存的反复申请和释放。最后,调用
schedule(),开始新一轮的调度。
// goroutine运行结束,此时执行方是普通g
func goexit1() {
// 通过mcall,将执行方转为g0,调用goexit0方法
mcall(goexit0)
}
// 此时执行方为g0,入参gp为已经运行结束的g
func goexit0(gp *g) {
_g_ := getg() // 获取g0
_p_ := _g_.m.p.ptr()
// 将gp的状态由running更新为dead
casgstatus(gp, _Grunning, _Gdead)
// ... 清理工作 ...
// 将g和p解除关系
dropg()
// 将g添加到p的gfree队列中以供复用
gfput(_p_, gp)
// 发起新一轮调度流程
schedule()
}4.2 高风亮节:主动让渡
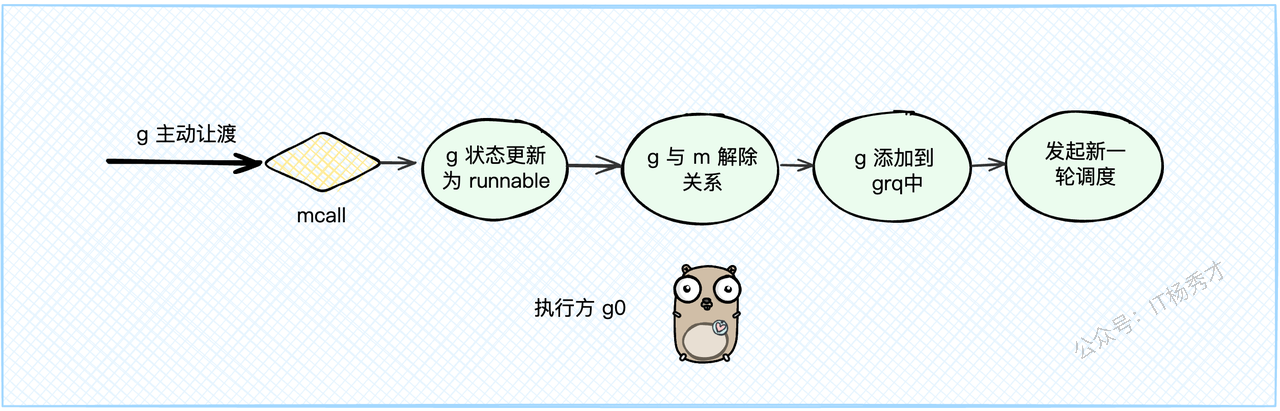
我们可以通过在代码里调用 runtime.Gosched() 来手动让一个G让出CPU。这个函数会做和goexit1类似的事情:
调用
mcall(gosched_m),把执行权从当前G切换到g0。g0执行gosched_m函数,它的逻辑是:把G的状态从
_Grunning改回_Grunnable。解除G和M的绑定。
把这个G直接扔到全局队列GRQ中,等待下一次被调度。
调用
schedule(),开始新一轮调度。
// 主动让渡出执行权,此时执行方还是普通g
func Gosched() {
// 通过mcall,将执行方转为g0,调用gosched_m方法
mcall(gosched_m)
}
// 此时执行方为g0
func gosched_m(gp *g) {
// ...
goschedImpl(gp)
}
func goschedImpl(gp *g) {
// 将g状态由running改为runnable就绪态
casgstatus(gp, _Grunning, _Grunnable)
// 解除g和m的关系
dropg()
// 将g添加到全局队列grq
lock(&sched.lock)
globrunqput(gp)
unlock(&sched.lock)
// 发起新一轮调度
schedule()
}4.3 情非得已:阻塞让渡
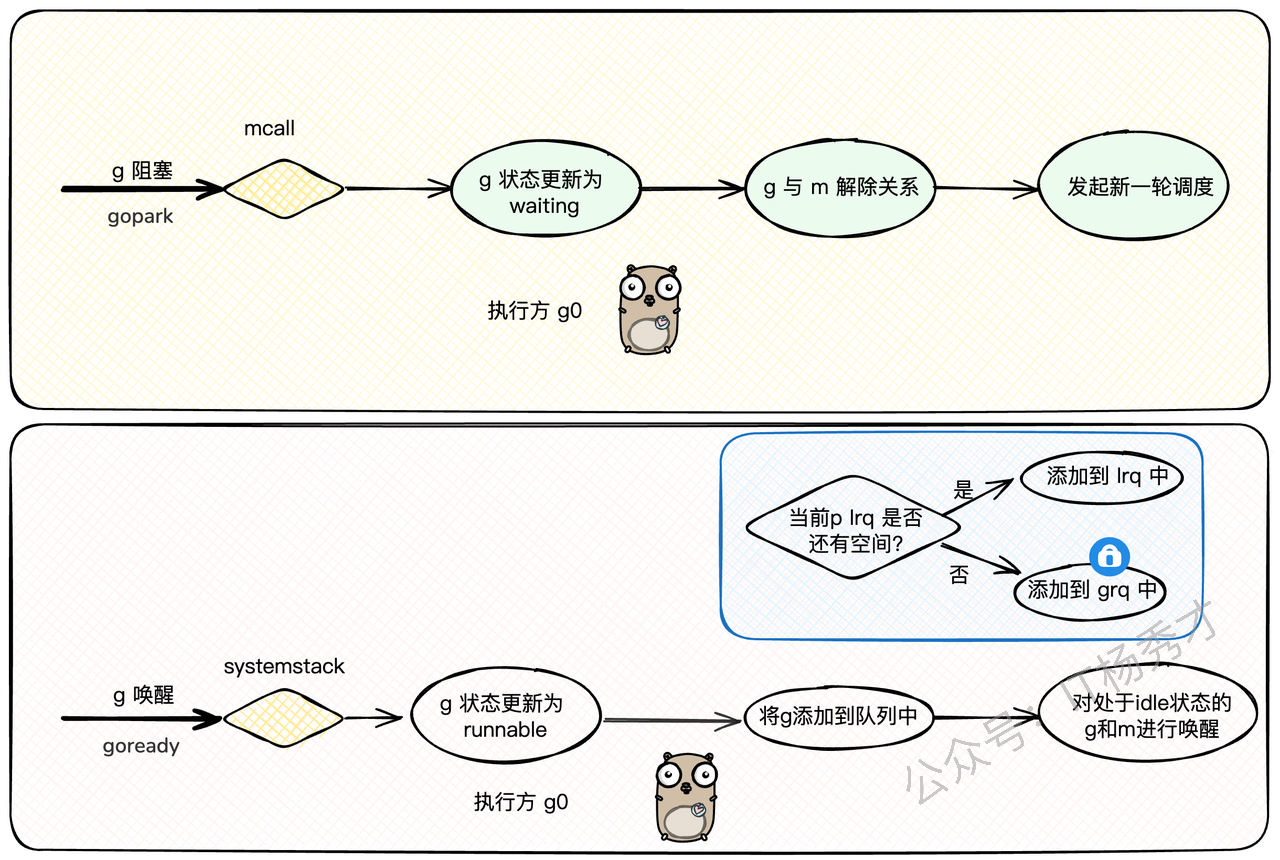
这是最常见的一种让渡方式。当G执行到需要等待某个外部条件的地方(比如读一个空的channel,或者等待一个锁),它就会被阻塞。
这个过程的核心是gopark函数:
当G需要阻塞时,上层函数(比如channel的读写逻辑)会调用
gopark。gopark同样会调用mcall(park_m),把执行权交给g0。g0执行park_m,它会:把G的状态从
_Grunning改为_Gwaiting。解除G和M的绑定。
注意:
_Gwaiting状态的G不会被放到任何就绪队列里!它会被上层调用者(比如channel)自己保管。g0调用schedule(),寻找下一个G来执行。
当外部条件满足时(比如channel里有了数据),另一个G会调用goready函数来唤醒这个处于_Gwaiting状态的G。
goready会:
把目标G的状态从
_Gwaiting改回_Grunnable。调用
runqput,把这个G重新放回到就绪队列(LRQ或GRQ)中。调用
wakep,尝试唤醒一个空闲的P来处理这个刚被唤醒的G。
这一park一ready,完美地实现了G级别的阻塞和唤醒,整个过程高效且对用户透明。
以下是具体的代码分析:
// 此时执行方为普通 g
func gopark(unlockf func(*g, unsafe.Pointer)bool,lockunsafe.Pointer, reason waitReason, traceEv byte, traceskip int){
// 获取 m 正在执行的 g,也就是要阻塞让渡的 g
gp := mp.curg
// ...
// 通过 mcall,将执行方由普通 g -> g0
mcall(park_m)
}
// 此时执行方为 g0. 入参 gp 为需要执行 park 的普通 g
func park_m(gp *g){
// 获取 g0
_g_ := getg()
// 将 gp 状态由 running 变更为 waiting
casgstatus(gp,_Grunning,_Gwaiting)
// 解绑 g 与 m 的关系
dropg()
// g0 发起新一轮调度流程
schedule()
}与 gopark 相对的,是用于唤醒 g 的 goready 方法,其中会通过 systemstack 压栈切换至 g0 执行 ready 方法——将目标 g 状态由 waiting 改为 runnable,然后添加到就绪队列中.
// 此时执行方为普通 g. 入参 gp 为需要唤醒的另一个普通 g
func goready(gp *g, traceskip int) {
// 调用 systemstack 后,会切换至 g0 亚展调用传入的 ready 方法. 调用结束后则会直接切换回到当前普通 g 继续执行.
systemstack(func() {
ready(gp, traceskip, true)
})
// 恢复成普通 g 继续执行 ...
}// 此时执行方为 g0. 入参 gp 为拟唤醒的普通 g
func ready(gp *g, traceskip int, next bool){
// ...
// 获取当前 g0
_g_ := getg()
// ...
// 将目标 g 状态由 waiting 更新为 runnable
casgstatus(gp,_Gwaiting,_Grunnable)
/*
1) 优先将目标 g 添加到当前 p 的本地队列 lrq
2)若 lrq 满了,则将 g 追加到全局队列 grq
*/
runqput(_g_.m.p.ptr(), gp,next)
// 如果有 m 或 p 处于 idle 状态,将其唤醒
wakep()
// ...
}5. 第三方视角:抢占式调度
前面说的"让渡"都是G的主动行为。但如果一个G是个"老赖",执行一个超长的计算任务,一直不主动让出CPU怎么办?难道要让整个系统都等它一个吗?
当然不行!Go调度器还有一个"霸道总裁"的角色来强制干预,就是抢占(Preemption)。一个由外部力量发起的、为了维护整个系统公平和效率的"强制让位"过程。
5.1 幕后英雄:无处不在的sysmon
在我们的Go程序启动时,除了我们熟知的主线程外,runtime还会悄悄启动一个非常关键的后台线程——sysmon(System Monitor,系统监控)。
你可以把它想象成一个永不休息的"巡逻兵",它独立于普通的G-P-M调度模型,持续地在后台循环执行。这个线程在整个程序生命周期里是全局唯一的,就像一个大管家,不知疲倦地监视着整个Go程序的运行状态。

sysmon 的工作是一个永不停歇的循环,它主要关心三件大事儿:
网络轮询(netpoll):检查有没有已经完成IO操作的网络连接,唤醒那些等待IO的Goroutine。
抢占(retake):找出那些运行时间太长的Goroutine,毫不留情地把它"踹"下CPU。
GC触发检查:看看是不是时候该进行垃圾回收(GC)了。
这个 sysmon 线程是在哪里创建的呢?答案就在 main 函数启动的深处。Go运行时会通过 newm 创建一个新的系统线程(M)专门来跑 sysmon 这个函数。
它的核心工作逻辑大致如下:
// The main goroutine.
// main goroutine的入口
func main(){
systemstack(func() {
// 创建一个新的M(系统线程)来执行sysmon函数
// 这个M不关联任何P,是一个专门用于系统监控的线程
newm(sysmon, nil, -1)
})
// ...
}
// sysmon是系统监控函数,它在一个独立的M上无限循环运行
func sysmon() {
//..
for {
// 根据程序的繁忙程度,动态调整休眠时间
// 如果程序比较空闲,会休眠长一点,最长10毫秒
usleep(delay)
// ...
// 记录上次网络轮询的时间
lastpoll := int64(atomic.Load64(&sched.lastpoll))
// 如果网络轮询器已初始化,并且距离上次轮询超过10ms
if netpollinited() && lastpoll != 0 && lastpoll+10*1000*1000 < now {
//...
// 执行非阻塞的网络轮询,返回一个就绪的goroutine列表
list := netpoll(0)
// ...
}
// 执行抢占工作,这是我们的重点
retake(now)
//...
// 检查是否需要触发GC
if t := (gcTrigger{kind: gcTriggerTime, now: now}); t.test() && atomic.Load(&forcegc.idle) != 0 {
// ...
}
// ...
}
}可以看到,sysmon 的核心就是一个 for 死循环,每次循环都会执行一遍它的"三板斧"。而我们的抢占逻辑,就藏在 retake 这个函数里。retake 会根据Goroutine的不同状态,采取不同的抢占策略,主要分为两种:系统调用抢占和运行超时抢占。
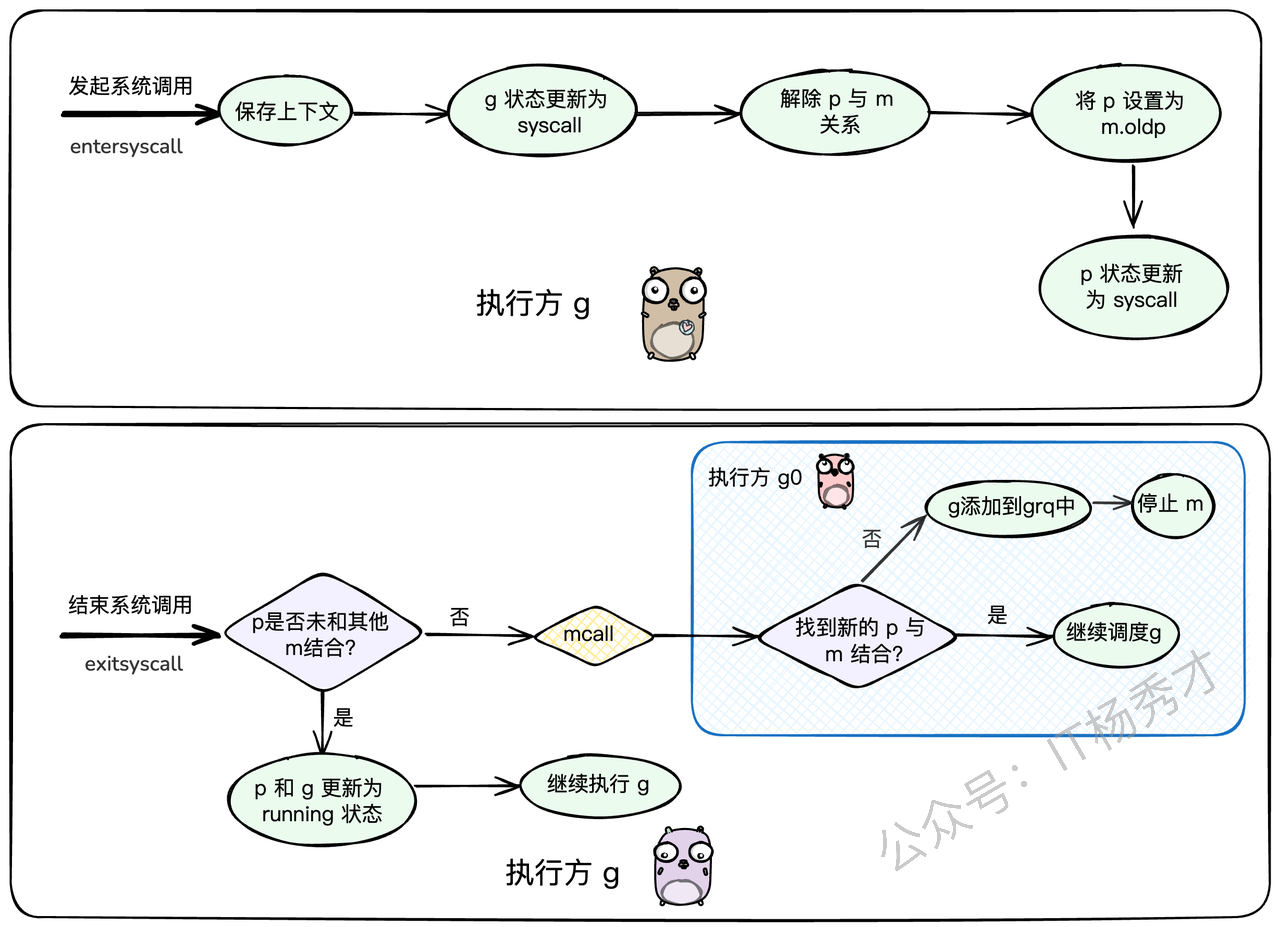
5.2 系统调用抢占
我们知道,系统调用(syscall)是连接用户态程序和操作系统内核的桥梁。但当一个M(系统线程)陷入系统调用时,它就会被操作系统挂起,暂时无法执行任何用户态代码。这对Go的调度器来说是个大问题,因为如果M上还绑定着一个P(处理器),那这个P也就跟着被闲置了,它所管理的本地Goroutine队列就得不到执行,造成了资源浪费。
Go的策略非常聪明:人走可以,但办公桌得留下!
当一个Goroutine即将发起系统调用时,调度器会做几件事:
解除P与M的绑定:把当前线程M和处理器P分离开。
状态更新:把Goroutine和P的状态都更新为
_Gsyscall和_Psyscall。保留弱联系:虽然P和M分开了,但M会记住这个P(存放在
m.oldp),方便回来的时候能"再续前缘"。寻找新机会:脱离了M的P,可以去和其他空闲的M结合,继续执行其他Goroutine,一点都不耽误事儿。
这个过程主要发生在 reentersyscall 函数中:
// reentersyscall 在goroutine进入系统调用时被调用
func reentersyscall(pc, sp uintptr) {
_g_ := getg() // 获取当前的goroutine
// ...
// 保存当前的程序计数器(PC)和栈指针(SP)等上下文信息
save(pc, sp)
// ...
// 1. 将goroutine的状态从 _Grunning 更新为 _Gsyscall
casgstatus(_g_, _Grunning, _Gsyscall)
// ...
// 2. 解除 P 和 M 的绑定关系
pp := _g_.m.p.ptr()
pp.m = 0 // P的m指针置空
_g_.m.p = 0 // M的p指针置空
// 3. 将P设置为M的oldp,建立一个弱引用关系
_g_.m.oldp.set(pp)
// 4. 将P的状态更新为 _Psyscall
atomic.Store(&pp.status, _Psyscall)
// ...
}等系统调用结束,Goroutine从内核态返回时,会执行 exitsyscall 函数。这时它会尝试"复位归来":
快速路径:先看看之前那个P(
oldp)是不是还单身(没有和其他M结合)。如果是,太好了,直接拿回来用,光速恢复执行。慢速路径:如果P已经被别的M"拐走"了,那就没办法了。当前Goroutine会被切换到
g0栈,执行exitsyscall0,尝试为自己所在的M寻找一个新的空闲P。如果找到了,就继续执行;如果找不到,说明现在很忙,M就会被挂起,这个Goroutine则被放到全局队列中,等待下一次被调度
// exitsyscall 在goroutine退出系统调用时执行
func exitsyscall() {
_g_ := getg() // 获取当前goroutine
// ...
// 尝试快速路径:如果oldp没有被其他M绑定,就直接复用
oldp := _g_.m.oldp.ptr()
_g_.m.oldp = 0
if exitsyscallfast(oldp) {
// ...
// 快速恢复成功,将g的状态改回_Grunning
casgstatus(_g_, _Gsyscall, _Grunning)
// ...
return // 直接返回,继续执行g
}
// 快速路径失败,切换到g0栈,执行慢速路径逻辑
mcall(exitsyscall0)
// ...
}
// exitsyscall0 在g0栈上为当前M寻找一个新的P
func exitsyscall0(gp *g) {
// 将goroutine的状态从 _Gsyscall 改为 _Grunnable 就绪态
casgstatus(gp, _Gsyscall, _Grunnable)
// 解除g和当前M的绑定
dropg()
lock(&sched.lock)
// 尝试从空闲列表获取一个P
var _p_ *p
_p_, _ = pidleget(0)
// ...
// 如果没有找到空闲的P
if _p_ == nil {
// 将g放入全局运行队列
globrunqput(gp)
// ...
}
// ...
unlock(&sched.lock)
// 如果找到了P
if _p_ != nil {
// 绑定P,然后立即执行这个goroutine
acquirep(_p_)
execute(gp, false) // 不会返回
}
// 如果没找到P,M只能进入休眠
stopm()
// 当M被唤醒后,重新开始调度循环
schedule() // 不会返回
}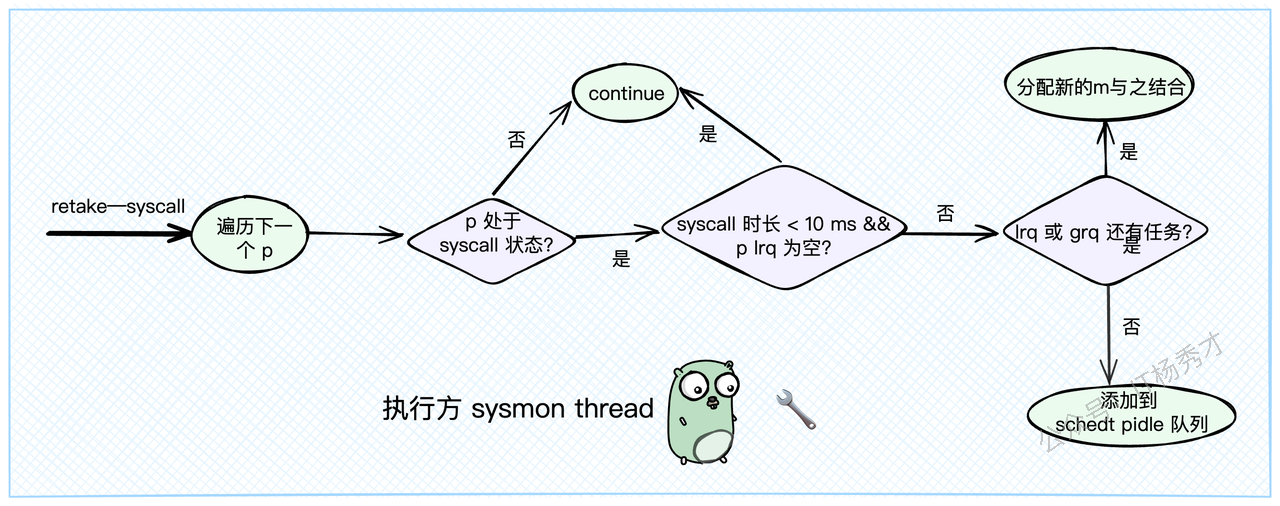
你可能会问,这和 sysmon 有什么关系?关系大了!sysmon 会在它的 retake 检查中,遍历所有的P。如果发现某个P长时间处于 _Psyscall 状态(默认超过10ms),或者这个P虽然在syscall,但它的本地队列里还有其他Goroutine在排队,sysmon 就会认为不能再等了,必须执行抢占。 它会调用 handoffp,强制把这个P从syscall的M那里"抢"过来,分配给一个新的或者空闲的M,去执行P本地队列里的其他任务。
// retake 函数由 sysmon 线程周期性调用
func retake(now int64) uint32{
n :=0
// 加锁
lock(&allpLock)
// 遍历所有 p
for i :=0; i <len(allp); i++{
_p_ := allp[i]
// ...
s := _p_.status
// ...
// 对于正在执行 syscall 的 p
if s ==_Psyscall{
// 如果 p 本地队列为空且发起系统调用时间 < 10ms,则不进行抢占
if runqempty(_p_)&& atomic.Load(&sched.nmspinning)+atomic.Load(&sched.npidle)>0&& pd.syscallwhen+10*1000*1000> now {
continue
}
unlock(&allpLock)
// 将 p 的状态由 syscall 更新为 idle
if atomic.Cas(&_p_.status, s,_Pidle){
// ...
// 让 p 拥有和其他 m 结合的机会
handoffp(_p_)
}
// ...
lock(&allpLock)
}
}
unlock(&allpLock)
return uint32(n)
}func handoffp(_p_ *p) {
// 如果 p lrq 中还有 g 或者全局队列 grq 中还有 g,则立即分配一个新 m 与该 p 结合
if!runqempty(_p_)|| sched.runqsize !=0{
// 分配一个 m 与 p 结合
startm(_p_,false)
return
}
// ...
// 若系统空闲没有 g 需要调度,则将 p 添加到 schedt 中的空闲 p 队列 pidle 中
pidleput(_p_,0)
// ...
}5.3 运行超时抢占
除了系统调用,另一种需要抢占的场景就是Goroutine运行时间过长。比如一个纯计算的循环,没有任何IO或channel操作,它就会像个"钉子户"一样霸占着CPU。
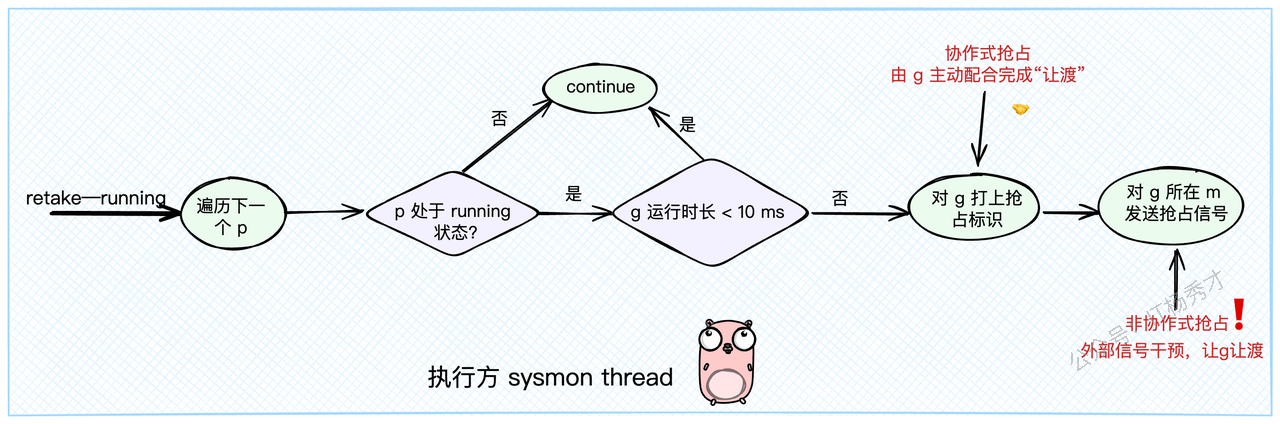
sysmon 在 retake 函数中同样会检查每个处于 _Prunning 状态的P。它会看当前P上的Goroutine从何时开始执行(schedwhen),如果执行时间超过了一个阈值(forcePreemptNS,通常是10ms),sysmon 就会认为需要抢占了。
// retake 函数的一部分
func retake(now int64) uint32 {
// ...
for i := 0; i < len(allp); i++ {
_p_ := allp[i]
// ...
// 如果P正在运行
if s == _Prunning {
// ...
// 检查当前goroutine的执行时间是否超过了10ms
if _p_.schedwhen+forcePreemptNS <= now {
// 发起抢占
preemptone(_p_)
}
}
}
// ...
}这里的抢占又分为两种方式:一种是"好言相劝",一种是"强行执法"。
5.3.1 协作式抢占
这是Go早期版本就有的抢占方式,比较"温柔"。sysmon 在决定抢占后,会调用 preemptone 函数。这个函数首先会给目标Goroutine打上一个"抢占标记"。具体来说,就是把 gp.preempt 设置为 true,同时把 gp.stackguard0 设置为一个特殊值 stackPreempt。
// preemptone 抢占指定P上正在运行的g
func preemptone(_p_ *p) bool {
// 获取P上绑定的M
mp := _p_.m.ptr()
// 获取M上正在运行的g,也就是我们的抢占目标
gp := mp.curg
// ...
// 1. 设置协作式抢占标志
gp.preempt = true
// 2. 修改栈保护标志,这是协作式抢占的关键
// 当g进行函数调用(特别是涉及栈检查)时,会检查这个值
gp.stackguard0 = stackPreempt
// ...
}这个 stackguard0 标志位非常关键。Goroutine在执行函数调用时,尤其是可能导致栈扩容的场景下,会检查这个标志位。当它发现 stackguard0 变成了 stackPreempt,就知道:"哦,调度器想让我让位了"。于是,它就会很"自觉"地停止当前工作,调用 gopreempt_m,将自己重新放回全局队列,让出CPU。这个过程就叫做协作式抢占。
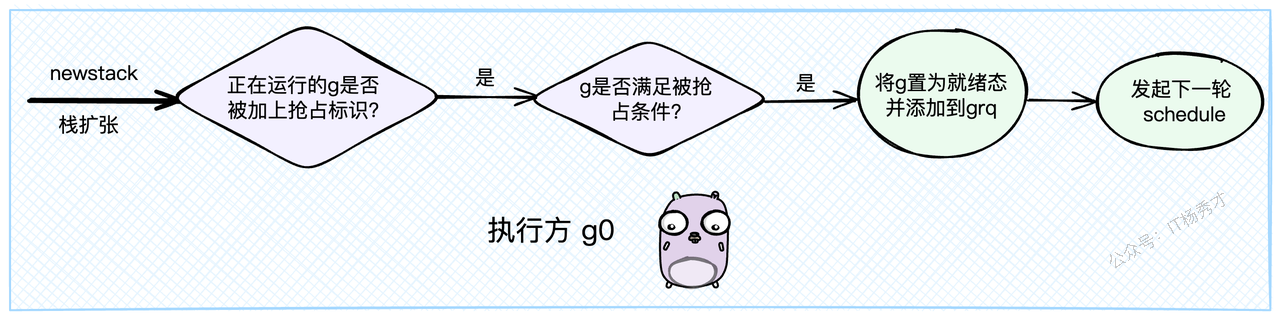
这个检查点通常在 newstack 函数中,也就是栈扩容的逻辑里:
// newstack 在g0栈上为goroutine扩展栈空间时执行
func newstack() {
// 获取当前需要扩容栈的goroutine
gp := thisg.m.curg
// 读取g的栈保护标志
stackguard0 := atomic.Loaduintptr(&gp.stackguard0)
// 如果标志被设置为stackPreempt,说明被标记为需要抢占
if stackguard0 == stackPreempt {
// 检查当前g是否满足被抢占的条件(比如没有持有锁等)
if canPreemptM(thisg.m) {
// 条件满足,响应抢占,执行让渡操作
gopreempt_m(gp) // 这个函数不会返回
}
}
// ...
}
// gopreempt_m 会走到 goschedImpl,后续流程和主动让渡(gosched)一样
func gopreempt_m(gp *g) {
// ...
goschedImpl(gp)
}
func goschedImpl(gp *g) {
// g状态从_Grunning变为_Grunnable
casgstatus(gp, _Grunning, _Grunnable)
// 解绑M
dropg()
// 加锁后放入全局队列
lock(&sched.lock)
globrunqput(gp)
unlock(&sched.lock)
// 触发新一轮调度
schedule()
}但协作式抢占有个明显的缺点:如果一个Goroutine是个铁憨憨,一直在执行纯计算的死循环,没有任何函数调用,那它就永远没有机会去检查 stackguard0,也就无法响应抢占意图。这可怎么办?
5.3.2 非协作式抢占
为了解决协作式抢占的短板,Go 1.14 版本引入了基于信号的抢占机制,也就是非协作式抢占。这种方式就非常"硬核"了。
在 preemptone 函数中,除了设置协作标记,还会做一件事:向目标Goroutine所在的M(线程)发送一个信号 sigPreempt。
// preemptone 函数的另一部分
func preemptone(_p_ *p) bool {
// ... (前面设置协作标记的代码)
// 3. 基于信号实现非协作式抢占
if preemptMSupported && debug.asyncpreemptoff == 0 {
_p_.preempt = true
// 向目标M发送抢占信号
preemptM(mp)
}
return true
}
func preemptM(mp *m) {
// ...
// 向指定的线程(由mp.procid标识)发送sigPreempt信号
signalM(mp, sigPreempt)
// ...
}
func signalM(mp *m, sig int) {
// 底层通过pthread_kill实现向线程发送信号
pthread_kill(pthread(mp.procid), uint32(sig))
}Go程序启动时,会注册一个信号处理器 sighandler 来处理各种信号,其中就包括了我们的 sigPreempt
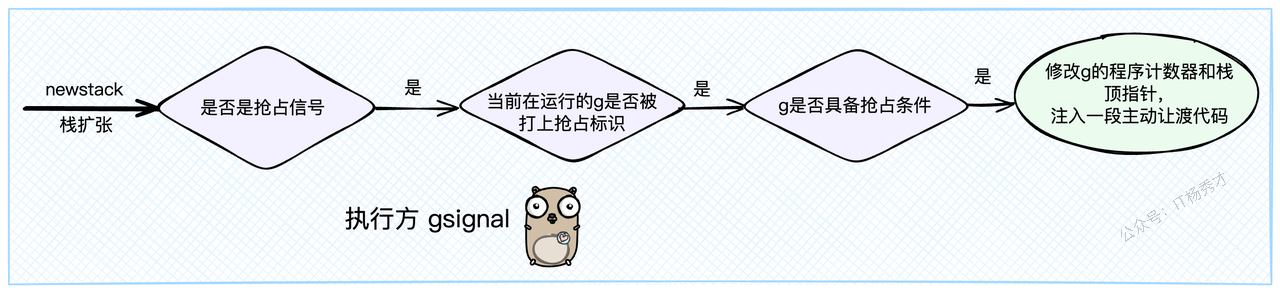
当M接收到 sigPreempt 信号后,操作系统会中断M的当前执行,转而去执行sighandler。 信号处理函数会发现这是一个抢占信号,然后检查当前的Goroutine是否满足被抢占的条件(例如,没有在执行一些敏感的运行时代码)。
如果条件满足,最关键的一步来了:sighandler会像一个黑客一样,直接修改G的寄存器信息,主要是程序计数器(PC)和栈顶指针(SP)。它会强行在G的执行流中"注入"一段代码,这段代码就是 asyncPreempt 函数。
// sighandler 是go的信号处理总入口
// 它在gsignal这个特殊的goroutine上执行
func sighandler(sig uint32, info *siginfo, ctxt unsafe.Pointer, gp *g) {
// ...
// 如果收到了抢占信号
if sig == sigPreempt {
// 执行抢占处理
doSigPreempt(gp, ctxt)
}
// ...
}
// doSigPreempt 执行具体的信号抢占逻辑
func doSigPreempt(gp *g, ctxt *sigctxt) {
// 判断g是否满足抢占条件
if wantAsyncPreempt(gp) {
if ok, newpc := isAsyncSafePoint(gp, ctxt.sigpc(), ctxt.sigsp(), ctxt.siglr()); ok {
// 通过修改g的寄存器,强行让它下一条指令去执行asyncPreempt
ctxt.pushCall(abi.FuncPCABI0(asyncPreempt), newpc)
}
}
// ...
}
// pushCall 修改栈指针和程序计数器,实现"指令注入"
func (c *sigctxt) pushCall(targetPC, resumePC uintptr) {
// 获取当前栈顶指针 sp (rsp寄存器)
sp := uintptr(c.rsp())
// 栈向下移动一个指针大小,为返回地址腾出空间
sp -= goarch.PtrSize
// 将原始的下一条指令地址(resumePC)存入新的栈顶
*(*uintptr)(unsafe.Pointer(sp)) = resumePC
// 更新栈顶指针
c.set_rsp(uint64(sp))
// 将程序计数器(rip寄存器)设置为我们要注入的函数的地址 (targetPC)
c.set_rip(uint64(targetPC))
}这样一来,当信号处理结束,G恢复执行时,它下一条要执行的指令不再是原来被打断的地方,而是被篡改为了 asyncPreempt 函数。这个函数会立即调用 mcall 切换到 g0 栈,执行 gopreempt_m,最终完成让渡操作,和协作式抢占殊途同归。
// asyncPreempt2 是被强行注入的代码逻辑
// 此时的执行方是被抢占的g自己
func asyncPreempt2() {
gp := getg()
// ...
// 切换到g0栈,调用gopreempt_m完成让渡
mcall(gopreempt_m)
// ...
}至此,哪怕是最顽固的"钉子户"Goroutine,也会被这种强制手段给请下CPU,保证了调度器的公平性。
抢占是Go调度器为了公平和效率,由sysmon线程发起的强制性调度行为。
系统调用抢占:通过解绑P和M,让P可以继续服务其他Goroutine,避免因单个M阻塞导致整个P被浪费。
运行超时抢占:针对长时间运行的Goroutine,Go提供了两手准备:
协作式抢占:温柔地打个标记,让Goroutine在函数调用时"自觉"让出CPU。
非协作式抢占:对于不自觉的Goroutine,直接发送信号,通过修改PC和SP寄存器的方式,强行中断其执行,注入让渡逻辑。
正是有了这套精密的、软硬兼施的抢占机制,Go的并发调度才能如此健壮和高效,让我们能够放心地创建和使用海量的Goroutine。
6. 小结
本文从宏观的架构,到微观的源码实现,再到正向、逆向、第三方三种视角,全方位地把GMP给解剖了一遍。
希望通过这篇文章,你能对Go的并发调度有一个更深刻、更系统的理解。GMP模型无疑是Go语言设计的精髓所在,它优雅、高效地解决了并发调度中的种种难题,是我们每个Gopher都应该掌握的核心知识。
关注秀才公众号:IT杨秀才,领取精品学习资料
- 公众号后台回复:Go面试,领取Go面试题库PDF
- 公众号后台回复:Go学习,领取Go必看书籍
- 公众号后台回复:大模型,领取大模型学习资料
- 公众号后台回复:111,领取架构学习资料
- 公众号后台回复:26届秋招,领取26届秋招企业汇总表