3. Agent的规划能力
如果说工具是 Agent 的双手,记忆是 Agent 的记事本,那么规划能力就是 Agent 的"指挥部"——它决定了 Agent 面对一个复杂任务时,应该先做什么、后做什么、遇到问题怎么调整。没有规划能力的 Agent,就像一个拿着一堆工具却没有施工图纸的工人,虽然手里家伙齐全,但真正执行任务时就会毫无章法。
在前面的文章中,我们了解了 Agent 的核心架构和 ReAct 循环。ReAct 让 Agent 能够在"思考"和"行动"之间交替进行,但这还只是一种基础的决策模式——每一步都是即时反应式的。而真正复杂的任务需要 Agent 具备更高层次的规划能力:能够站在全局视角审视任务,把大目标拆分成小步骤,在多条可能的路径中选出最优解,甚至在执行过程中发现计划有误时主动纠错。
接下来,我们就来系统地拆解 Agent 的规划能力。从最基础的任务分解讲起,到 Plan-and-Execute 这种先规划后执行的架构范式,再到 Tree of Thoughts 这样的多路径探索策略,最后讲 Reflection 自我纠错机制。这四个层次,恰好构成了 Agent 规划能力从简单到高级的完整图谱。
1. 任务分解
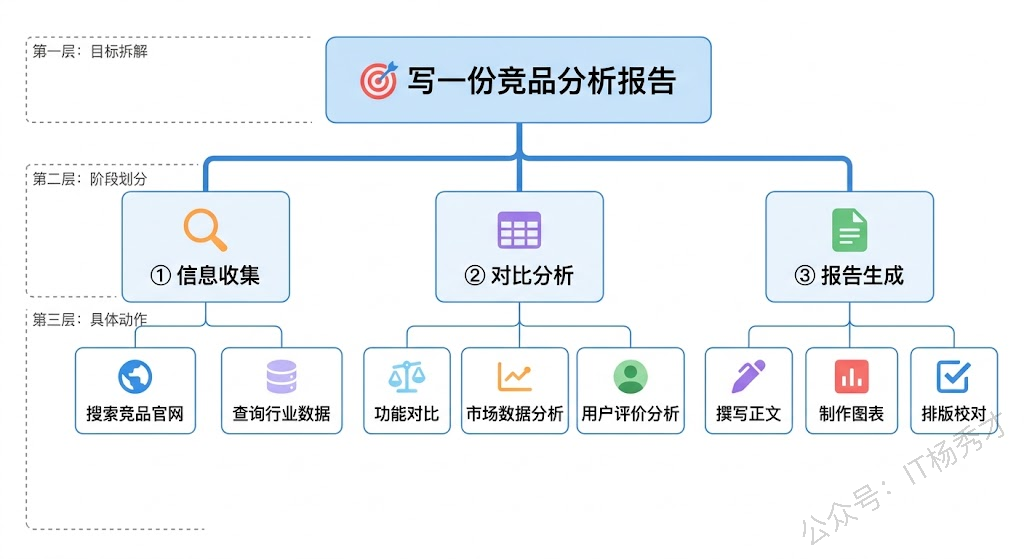
规划的第一要义就是把一个看起来复杂甚至不可能的任务,拆解成一系列简单可执行的步骤。
对于人类来说,任务分解几乎是本能。你让一个程序员"开发一个用户注册功能",他会自动地在脑子里把这件事拆开:先设计数据库表结构、再写注册 API、然后做参数校验、接着加密密码存储、最后写单元测试。每一步都是清晰的、可执行的,整个流程的先后顺序也是合理的。
大模型本身就具备一定的任务分解能力。当你在 Prompt 里写"请一步步思考"的时候,模型就会尝试把问题拆解成多个步骤来推理——这就是我们之前聊过的 Chain of Thought(思维链)技术。但 Agent 场景下的任务分解,比单纯的 CoT 要复杂得多,因为它不仅要"想清楚步骤",还要考虑每一步需要调用什么工具、每一步的输出如何作为下一步的输入、以及步骤之间的依赖关系。
来看一个用 Go 代码模拟任务分解过程的例子。我们让大模型对一个复杂任务进行分解,返回结构化的步骤列表:
package main
import (
"context"
"encoding/json"
"fmt"
"log"
"os"
openai "github.com/sashabaranov/go-openai"
)
// TaskStep 表示分解后的单个步骤
type TaskStep struct {
StepNumber int `json:"step_number"`
Description string `json:"description"`
ToolNeeded string `json:"tool_needed"`
DependsOn []int `json:"depends_on"`
Output string `json:"expected_output"`
}
// TaskPlan 表示完整的任务计划
type TaskPlan struct {
Goal string `json:"goal"`
Steps []TaskStep `json:"steps"`
}
func decomposeTask(task string) (*TaskPlan, error) {
config := openai.DefaultConfig(os.Getenv("DASHSCOPE_API_KEY"))
config.BaseURL = "https://dashscope.aliyuncs.com/compatible-mode/v1"
config.APIType = openai.APITypeOpenAI
client := openai.NewClientWithConfig(config)
systemPrompt := `你是一个任务规划专家。用户会给你一个复杂任务,你需要将其分解为具体的执行步骤。
请以JSON格式返回,结构如下:
{
"goal": "任务目标",
"steps": [
{
"step_number": 1,
"description": "步骤描述",
"tool_needed": "需要的工具(如:web_search, database_query, text_generation, code_execution, none)",
"depends_on": [],
"expected_output": "这一步的预期输出"
}
]
}
注意:depends_on 字段表示该步骤依赖哪些前置步骤的编号。没有依赖的步骤填空数组。`
resp, err := client.CreateChatCompletion(
context.Background(),
openai.ChatCompletionRequest{
Model: "qwen-plus",
Messages: []openai.ChatCompletionMessage{
{Role: openai.ChatMessageRoleSystem, Content: systemPrompt},
{Role: openai.ChatMessageRoleUser, Content: "请分解这个任务:" + task},
},
Temperature: 0.3,
},
)
if err != nil {
return nil, fmt.Errorf("调用大模型失败: %w", err)
}
var plan TaskPlan
content := resp.Choices[0].Message.Content
if err := json.Unmarshal([]byte(content), &plan); err != nil {
return nil, fmt.Errorf("解析任务计划失败: %w", err)
}
return &plan, nil
}
func main() {
plan, err := decomposeTask("帮我调研Go语言主流Web框架,对比它们的性能和生态,最终输出一份推荐报告")
if err != nil {
log.Fatal(err)
}
fmt.Printf("任务目标:%s\n\n", plan.Goal)
for _, step := range plan.Steps {
deps := "无"
if len(step.DependsOn) > 0 {
depsJSON, _ := json.Marshal(step.DependsOn)
deps = string(depsJSON)
}
fmt.Printf("步骤%d:%s\n", step.StepNumber, step.Description)
fmt.Printf(" 工具:%s\n", step.ToolNeeded)
fmt.Printf(" 依赖:%s\n", deps)
fmt.Printf(" 预期输出:%s\n\n", step.Output)
}
}运行结果:
任务目标:调研Go语言主流Web框架,对比其性能和生态,并输出一份推荐报告
步骤1:识别当前Go语言主流Web框架(如Gin、Echo、Fiber、Chi、Beego、Martini、HTTPRouter等),收集其官方文档、GitHub仓库、最新稳定版本及核心定位
工具:web_search
依赖:无
预期输出:包含至少6个主流框架的名称、官网链接、GitHub star数(近一年趋势)、维护活跃度(最近commit时间/发布频率)、适用场景简述的初步清单
步骤2:检索各框架的权威性能基准测试数据(如TechEmpower Web Framework Benchmarks、go-web-framework-benchmark等开源项目),提取QPS、延迟、内存占用等关键指标(相同硬件/测试条件下的横向对比)
工具:web_search
依赖:[1]
预期输出:结构化性能对比表(框架名 | 平均QPS | p90延迟(ms) | 内存峰值(MB) | 测试场景说明)
步骤3:评估各框架的生态系统成熟度:中间件丰富度、ORM/DB集成支持(如GORM、SQLx)、认证授权方案(JWT/OAuth2)、模板引擎、CLI工具、可观测性(OpenTelemetry/Tracing)、社区问答活跃度(Stack Overflow标签量、Discord/Slack成员数)、中文文档质量
工具:web_search
依赖:[1]
预期输出:生态维度评分矩阵(每项按1–5分打分,并附依据来源链接或截图描述)
步骤4:分析典型生产案例与企业采用情况(如Gin被Docker、Tencent使用;Fiber被Vercel部分服务采用等),通过GitHub stars增长曲线、知名公司技术博客/开源项目引用佐证生态健康度
工具:web_search
依赖:[1,3]
预期输出:各框架的企业级应用实例列表(公司/项目名 + 使用场景 + 引用来源链接)
步骤5:综合性能、生态、学习成本、可维护性、长期演进风险(如是否依赖非标准库、是否过度封装)进行加权评估,形成推荐等级(首选/次选/场景专用/不推荐)
工具:text_generation
依赖:[2,3,4]
预期输出:多维度加权评估模型说明 + 框架推荐分级结论(含理由摘要)
步骤6:撰写结构化推荐报告:含引言、调研方法、框架概览、性能对比图表、生态分析、适用场景建议(如高并发API服务/快速MVP/微服务网关)、风险提示、最终推荐清单及落地建议
工具:text_generation
依赖:[1,2,3,4,5]
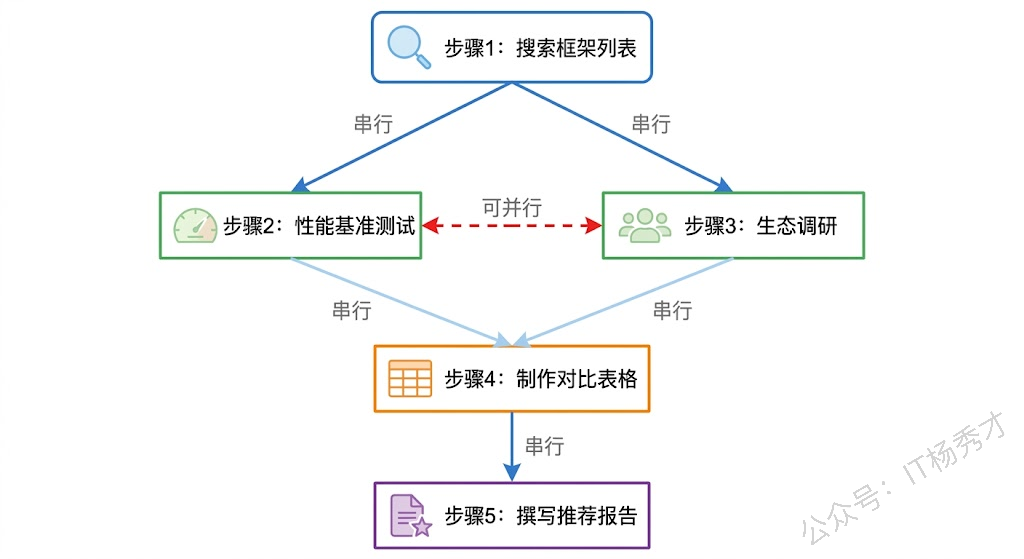
预期输出:一份完整Markdown格式推荐报告(含标题、小节、表格、简洁结论),可直接交付使用这个例子中有一个关键点:步骤之间的依赖关系。步骤2和步骤3都依赖步骤1(需要先知道有哪些框架才能分别去查性能和生态),但步骤2和步骤3之间没有依赖(可以并行执行)。步骤4依赖步骤2和步骤3(需要两方面数据都收集完才能做对比)。这种依赖关系形成了一个有向无环图(DAG),对于 Agent 的执行引擎来说至关重要——它决定了哪些步骤可以并行、哪些必须串行。
任务分解的质量直接决定了 Agent 执行的效率和成功率。一个好的分解应该满足几个条件:每个步骤足够具体,一个步骤只做一件事;步骤之间的依赖关系清晰;每个步骤的预期输出明确;步骤的粒度适中——太粗了执行不了,太细了又增加不必要的复杂度。
2. Plan-and-Execute
任务分解解决了"怎么拆"的问题,但还有一个更根本的架构问题没有回答:Agent 应该在什么时候做规划?是走一步看一步,还是先把整个计划想好再开始执行?
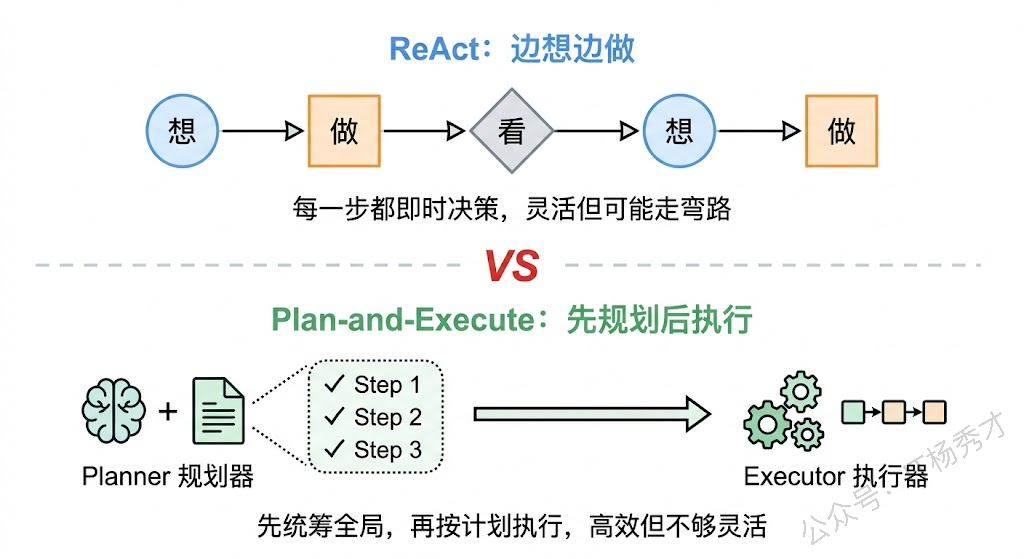
这就引出了两种截然不同的规划范式。第一种是我们之前聊过的 ReAct 模式——典型的"边想边做"策略。Agent 每一步都是先 Thought(思考当前该做什么),然后 Action(执行),再 Observation(观察结果),根据结果决定下一步。这种模式的优点是灵活——每一步都能根据最新情况动态调整,但缺点也很明显:它缺乏全局视野,每一步决策时只考虑了当前状态,可能导致"走了弯路才发现方向错了"。
第二种范式就是 Plan-and-Execute——先用一个"规划器"(Planner)一次性生成完整的执行计划,然后交给"执行器"(Executor)按计划逐步执行。这就像项目管理中的瀑布模型:先做需求分析和详细设计,确认方案没问题之后再开始编码。
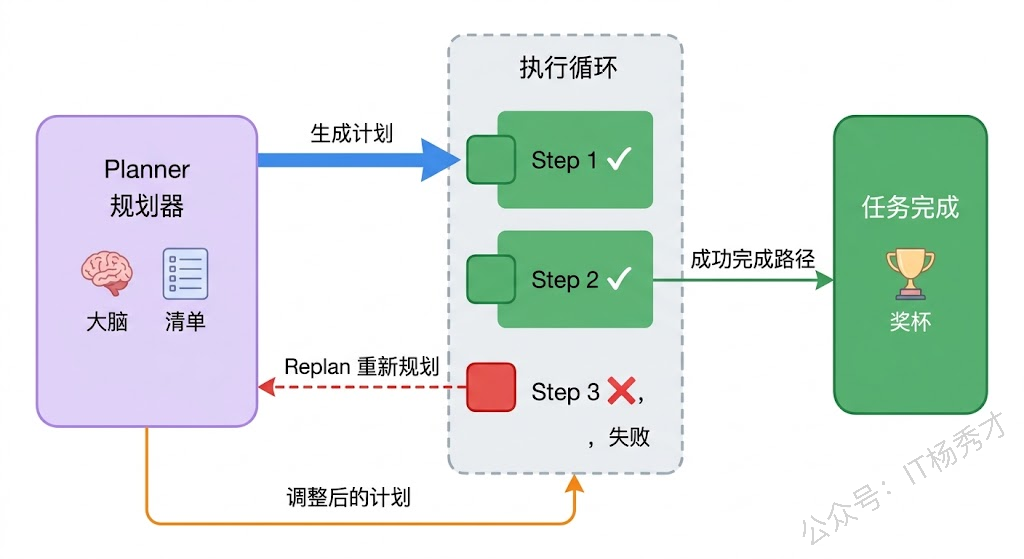
Plan-and-Execute 的核心思想其实很简单:让擅长推理的大模型专注于规划,让执行逻辑专注于行动,二者分而治之。在实际实现中,这种架构通常包含三个组件:一个负责生成计划的 Planner(通常是一次大模型调用,Prompt 侧重于任务分析和步骤拆解)、一个负责逐步执行的 Executor(可能是另一个 Agent,或者是一组工具调用逻辑)、以及一个可选的 Replanner(在执行过程中根据中间结果动态调整后续计划)。
Replanner 的存在让 Plan-and-Execute 不至于太"死板"。纯粹的"先规划后执行"有个明显的问题:如果计划的第二步就出了意外(比如某个 API 不可用),后面的步骤还按原计划走吗?显然不行。Replanner 就是用来解决这个问题的——它会在每一步执行完之后,评估当前进展,如果发现偏差就重新调整后续计划。这样既保留了全局规划的优势,又不失动态调整的灵活性。
下面用 Go 代码来实现一个简化版的 Plan-and-Execute 架构:
package main
import (
"context"
"encoding/json"
"fmt"
"log"
"os"
"strings"
openai "github.com/sashabaranov/go-openai"
)
// extractJSON 从LLM返回的内容中提取JSON,去除可能的markdown代码块包裹
func extractJSON(s string) string {
s = strings.TrimSpace(s)
// 去除 ```json ... ``` 或 ``` ... ``` 包裹
if strings.HasPrefix(s, "```") {
// 去掉第一行(```json 或 ```)
if idx := strings.Index(s, "\n"); idx != -1 {
s = s[idx+1:]
}
// 去掉最后的 ```
if idx := strings.LastIndex(s, "```"); idx != -1 {
s = s[:idx]
}
s = strings.TrimSpace(s)
}
return s
}
// Plan 表示一个执行计划
type Plan struct {
Steps []PlanStep `json:"steps"`
}
type PlanStep struct {
ID int `json:"id"`
Description string `json:"description"`
Status string `json:"status"` // pending, done, failed
Result string `json:"result"`
}
// Planner 负责生成计划
type Planner struct {
client *openai.Client
}
func NewPlanner() *Planner {
config := openai.DefaultConfig(os.Getenv("DASHSCOPE_API_KEY"))
config.BaseURL = "https://dashscope.aliyuncs.com/compatible-mode/v1"
config.APIType = openai.APITypeOpenAI
client := openai.NewClientWithConfig(config)
return &Planner{
client: client,
}
}
// CreatePlan 根据用户目标生成执行计划
func (p *Planner) CreatePlan(ctx context.Context, goal string) (*Plan, error) {
resp, err := p.client.CreateChatCompletion(ctx, openai.ChatCompletionRequest{
Model: "qwen-plus",
Messages: []openai.ChatCompletionMessage{
{
Role: openai.ChatMessageRoleSystem,
Content: `你是一个任务规划专家。根据用户的目标,生成3-5个简洁具体的执行步骤。
返回JSON格式:{"steps": [{"id": 1, "description": "步骤描述", "status": "pending", "result": ""}]}`,
},
{Role: openai.ChatMessageRoleUser, Content: goal},
},
Temperature: 0.3,
})
if err != nil {
return nil, err
}
var plan Plan
content := extractJSON(resp.Choices[0].Message.Content)
if err := json.Unmarshal([]byte(content), &plan); err != nil {
return nil, fmt.Errorf("解析计划失败: %w", err)
}
return &plan, nil
}
// Replan 根据执行进展调整后续计划
func (p *Planner) Replan(ctx context.Context, goal string, plan *Plan) (*Plan, error) {
// 构建当前进展摘要
var progress strings.Builder
for _, step := range plan.Steps {
progress.WriteString(fmt.Sprintf("步骤%d [%s]: %s", step.ID, step.Status, step.Description))
if step.Result != "" {
progress.WriteString(fmt.Sprintf(" -> 结果: %s", step.Result))
}
progress.WriteString("\n")
}
resp, err := p.client.CreateChatCompletion(ctx, openai.ChatCompletionRequest{
Model: "qwen-plus",
Messages: []openai.ChatCompletionMessage{
{
Role: openai.ChatMessageRoleSystem,
Content: `你是一个任务规划专家。根据原始目标和当前执行进展,判断是否需要调整后续计划。
如果当前计划仍然合理,原样返回剩余的pending步骤。
如果需要调整,返回新的步骤列表(保留已完成的步骤,调整pending的步骤)。
返回JSON格式:{"steps": [{"id": 1, "description": "步骤描述", "status": "状态", "result": "结果"}]}`,
},
{
Role: openai.ChatMessageRoleUser,
Content: fmt.Sprintf("原始目标:%s\n\n当前进展:\n%s\n请评估并返回更新后的计划。", goal, progress.String()),
},
},
Temperature: 0.3,
})
if err != nil {
return nil, err
}
var newPlan Plan
content := extractJSON(resp.Choices[0].Message.Content)
if err := json.Unmarshal([]byte(content), &newPlan); err != nil {
return nil, fmt.Errorf("解析新计划失败: %w", err)
}
return &newPlan, nil
}
// Executor 负责执行单个步骤
type Executor struct {
client *openai.Client
}
func NewExecutor() *Executor {
config := openai.DefaultConfig(os.Getenv("DASHSCOPE_API_KEY"))
config.BaseURL = "https://dashscope.aliyuncs.com/compatible-mode/v1"
config.APIType = openai.APITypeOpenAI
client := openai.NewClientWithConfig(config)
return &Executor{
client: client,
}
}
// Execute 执行单个步骤并返回结果
func (e *Executor) Execute(ctx context.Context, step PlanStep, previousResults []string) (string, error) {
contextInfo := ""
if len(previousResults) > 0 {
contextInfo = "\n前序步骤的结果:\n" + strings.Join(previousResults, "\n")
}
resp, err := e.client.CreateChatCompletion(ctx, openai.ChatCompletionRequest{
Model: "qwen-plus",
Messages: []openai.ChatCompletionMessage{
{
Role: openai.ChatMessageRoleSystem,
Content: "你是一个任务执行助手。请认真完成给定的步骤,给出简洁的执行结果。",
},
{
Role: openai.ChatMessageRoleUser,
Content: fmt.Sprintf("请执行以下步骤:%s%s", step.Description, contextInfo),
},
},
Temperature: 0.7,
})
if err != nil {
return "", err
}
return resp.Choices[0].Message.Content, nil
}
// PlanAndExecute 核心调度循环
func PlanAndExecute(goal string) {
ctx := context.Background()
planner := NewPlanner()
executor := NewExecutor()
// 第一阶段:生成计划
fmt.Println("=== 规划阶段 ===")
plan, err := planner.CreatePlan(ctx, goal)
if err != nil {
log.Fatal(err)
}
for _, step := range plan.Steps {
fmt.Printf(" 步骤%d:%s\n", step.ID, step.Description)
}
// 第二阶段:逐步执行
fmt.Println("\n=== 执行阶段 ===")
var results []string
for i := range plan.Steps {
step := &plan.Steps[i]
fmt.Printf("\n>> 执行步骤%d:%s\n", step.ID, step.Description)
result, err := executor.Execute(ctx, *step, results)
if err != nil {
step.Status = "failed"
step.Result = err.Error()
fmt.Printf(" ❌ 失败:%s\n", err.Error())
// 执行失败时触发 Replan
fmt.Println("\n=== 触发重新规划 ===")
newPlan, replanErr := planner.Replan(ctx, goal, plan)
if replanErr == nil {
plan = newPlan
fmt.Println("计划已调整,继续执行...")
}
continue
}
step.Status = "done"
step.Result = result
results = append(results, fmt.Sprintf("步骤%d结果:%s", step.ID, result))
// 只打印结果的前100个字符
display := result
if len(display) > 100 {
display = display[:100] + "..."
}
fmt.Printf(" ✅ 完成:%s\n", display)
}
fmt.Println("\n=== 任务完成 ===")
}
func main() {
PlanAndExecute("用Go语言写一个简单的HTTP服务器,支持JSON响应和日志中间件")
}运行结果:
=== 规划阶段 ===
步骤1:创建Go项目并初始化mod,定义项目结构
步骤2:实现基础HTTP服务器,监听端口并返回JSON响应
步骤3:实现日志中间件,记录请求方法、路径和耗时
步骤4:将中间件集成到HTTP服务器,注册路由并测试
=== 执行阶段 ===
>> 执行步骤1:创建Go项目并初始化mod,定义项目结构
✅ 完成:创建项目目录 http-server,执行 go mod init http-server,项目结构为:main.go(入口)、middleware/log...
>> 执行步骤2:实现基础HTTP服务器,监听端口并返回JSON响应
✅ 完成:在main.go中使用net/http包创建服务器,定义handler函数,使用json.Marshal序列化响应数据,设置Content-...
>> 执行步骤3:实现日志中间件,记录请求方法、路径和耗时
✅ 完成:在middleware/logger.go中实现LoggerMiddleware函数,接收http.Handler并返回新的http.Handler,使用time...
>> 执行步骤4:将中间件集成到HTTP服务器,注册路由并测试
✅ 完成:在main.go中用LoggerMiddleware包装handler,注册路由,启动服务器。通过curl测试确认JSON响应正常,日志...
=== 任务完成 ===这段代码的结构非常清晰地展示了 Plan-and-Execute 的三个核心角色:Planner 负责生成和调整计划,Executor 负责执行单个步骤,PlanAndExecute 函数是调度器,负责协调二者的工作。值得关注的是失败处理部分——当某一步执行失败时,调度器会调用 Planner.Replan() 来重新规划后续步骤,而不是简单地中止或跳过。
Plan-and-Execute 在实际 Agent 系统中非常流行,LangGraph 中的 plan_and_execute 就是这种架构的典型实现。它特别适合那些步骤相对明确、任务目标清晰的场景,比如数据处理流水线、自动化报告生成、多步骤信息检索等。但它也有局限性——如果任务本身非常开放、探索性很强(比如"帮我想一个创业点子"),强行生成一个详细计划反而会限制模型的发挥。
3. Tree of Thoughts
无论是 ReAct 的"走一步看一步",还是 Plan-and-Execute 的"先规划后执行",它们都有一个共同的局限:在每一步决策时,只走一条路。Agent 选定了某个行动方案,就沿着这条路走下去,直到成功或失败。
但很多现实问题并不是只有一条解题路径的。比如你在下棋时,每一步都有多种走法可选;写代码时,同一个功能可以有多种实现方案;解数学题时,可以用代数方法,也可以用几何方法。人类面对这类问题时,往往会在脑中同时展开多条思路,评估每条思路的前景,选择最有希望的那条继续深入——如果走不通再回退,换一条路试试。
Tree of Thoughts(思维树,简称 ToT)正是模拟了这种人类思维过程。它由 Yao 等人在 2023 年提出,核心思想是:把推理过程组织成一棵树,每个节点是一个"思维状态"(thought state),每次扩展时从当前状态生成多个可能的下一步思路,然后用评估函数对这些候选思路打分,选择最优的方向继续探索。
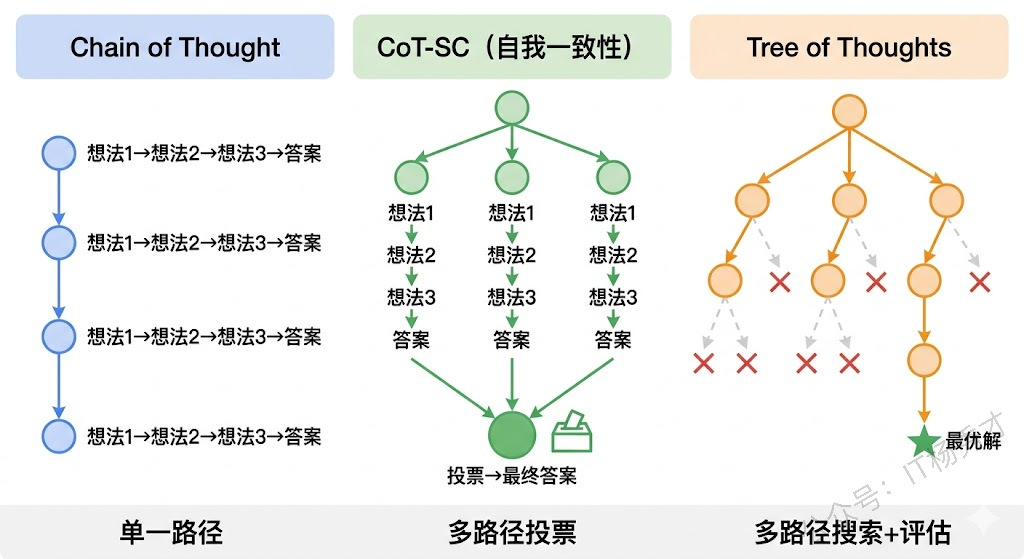
和 Chain of Thought 相比,ToT 引入了三个关键机制。第一个是分支生成(branching):在每一步,不只生成一个想法,而是让大模型生成多个候选想法,每个想法对应树的一个分支。第二个是状态评估(evaluation):对每个候选想法评估其价值——这一步走得对不对?前景好不好?这个评估可以用大模型本身来做(让模型自己判断"这个思路看起来有多大希望"),也可以用更简单的启发式规则。第三个是搜索策略(search):用 BFS(广度优先)或 DFS(深度优先)在树上进行搜索,遇到评分低的分支就剪枝(放弃),把计算资源集中在最有希望的方向上。
这三个机制结合起来,让 Agent 能够在面对不确定性时进行"有深度的探索"——不是盲目地穷举所有可能,而是有策略地搜索最优解。
来看一个用 Go 实现的简化版 ToT 框架:
package main
import (
"context"
"encoding/json"
"fmt"
"log"
"os"
"sort"
openai "github.com/sashabaranov/go-openai"
)
// ThoughtNode 思维树的节点
type ThoughtNode struct {
ID int
Thought string
Score float64
Children []*ThoughtNode
Parent *ThoughtNode
Depth int
}
// ToTSolver Tree of Thoughts求解器
type ToTSolver struct {
client *openai.Client
maxDepth int // 最大思考深度
branchNum int // 每一步生成的候选思路数
beamWidth int // 每层保留的最优节点数
}
func NewToTSolver(maxDepth, branchNum, beamWidth int) *ToTSolver {
config := openai.DefaultConfig(os.Getenv("DASHSCOPE_API_KEY"))
config.BaseURL = "https://dashscope.aliyuncs.com/compatible-mode/v1"
config.APIType = openai.APITypeOpenAI
client := openai.NewClientWithConfig(config)
return &ToTSolver{
client: client,
maxDepth: maxDepth,
branchNum: branchNum,
beamWidth: beamWidth,
}
}
// generateThoughts 生成多个候选思路
func (t *ToTSolver) generateThoughts(ctx context.Context, problem string, currentPath string) ([]string, error) {
prompt := fmt.Sprintf(`针对以下问题,基于当前的思考路径,请生成%d个不同的下一步思路。
每个思路应该是不同的方向或方法。
问题:%s
当前思考路径:%s
请以JSON数组格式返回%d个思路,每个思路是一段简洁的文字:
["思路1", "思路2", "思路3"]`, t.branchNum, problem, currentPath, t.branchNum)
resp, err := t.client.CreateChatCompletion(ctx, openai.ChatCompletionRequest{
Model: "qwen-plus",
Messages: []openai.ChatCompletionMessage{
{Role: openai.ChatMessageRoleUser, Content: prompt},
},
Temperature: 0.9, // 高温度以获得多样性
})
if err != nil {
return nil, err
}
var thoughts []string
if err := json.Unmarshal([]byte(resp.Choices[0].Message.Content), &thoughts); err != nil {
return nil, fmt.Errorf("解析思路失败: %w", err)
}
return thoughts, nil
}
// evaluateThought 评估某个思路的质量
func (t *ToTSolver) evaluateThought(ctx context.Context, problem string, thought string) (float64, error) {
prompt := fmt.Sprintf(`请评估以下思路对于解决问题的质量。
问题:%s
思路:%s
请给出1-10的评分(10分最好),只返回一个JSON对象:{"score": 8, "reason": "评分理由"}`, problem, thought)
resp, err := t.client.CreateChatCompletion(ctx, openai.ChatCompletionRequest{
Model: "qwen-plus",
Messages: []openai.ChatCompletionMessage{
{Role: openai.ChatMessageRoleUser, Content: prompt},
},
Temperature: 0.3,
})
if err != nil {
return 0, err
}
var result struct {
Score float64 `json:"score"`
Reason string `json:"reason"`
}
if err := json.Unmarshal([]byte(resp.Choices[0].Message.Content), &result); err != nil {
return 5, nil // 解析失败给个中间分
}
return result.Score, nil
}
// Solve 使用BFS策略求解
func (t *ToTSolver) Solve(problem string) *ThoughtNode {
ctx := context.Background()
nodeID := 0
// 根节点
root := &ThoughtNode{ID: nodeID, Thought: "开始分析问题", Depth: 0}
nodeID++
// BFS:逐层扩展
currentLevel := []*ThoughtNode{root}
for depth := 0; depth < t.maxDepth; depth++ {
fmt.Printf("\n=== 第%d层思考 ===\n", depth+1)
var nextLevel []*ThoughtNode
for _, node := range currentLevel {
// 构建从根到当前节点的思考路径
path := buildPath(node)
// 生成候选思路
thoughts, err := t.generateThoughts(ctx, problem, path)
if err != nil {
log.Printf("生成思路失败: %v", err)
continue
}
for _, thought := range thoughts {
child := &ThoughtNode{
ID: nodeID,
Thought: thought,
Parent: node,
Depth: depth + 1,
}
nodeID++
// 评估思路质量
score, err := t.evaluateThought(ctx, problem, path+" → "+thought)
if err != nil {
score = 5
}
child.Score = score
node.Children = append(node.Children, child)
nextLevel = append(nextLevel, child)
fmt.Printf(" 思路[%d] (%.1f分): %s\n", child.ID, score, truncate(thought, 60))
}
}
// 保留得分最高的 beamWidth 个节点(Beam Search剪枝)
sort.Slice(nextLevel, func(i, j int) bool {
return nextLevel[i].Score > nextLevel[j].Score
})
if len(nextLevel) > t.beamWidth {
fmt.Printf(" ✂ 剪枝:保留前%d个最优思路\n", t.beamWidth)
nextLevel = nextLevel[:t.beamWidth]
}
currentLevel = nextLevel
}
// 返回得分最高的叶子节点
if len(currentLevel) > 0 {
return currentLevel[0]
}
return root
}
// buildPath 构建从根到当前节点的路径字符串
func buildPath(node *ThoughtNode) string {
var path []string
for n := node; n != nil; n = n.Parent {
path = append([]string{n.Thought}, path...)
}
result := ""
for i, p := range path {
if i > 0 {
result += " → "
}
result += p
}
return result
}
func truncate(s string, maxLen int) string {
runes := []rune(s)
if len(runes) <= maxLen {
return s
}
return string(runes[:maxLen]) + "..."
}
func main() {
solver := NewToTSolver(
2, // 最大深度:2层
3, // 每步生成3个候选
2, // 每层保留2个最优
)
problem := "设计一个高并发的Go语言消息队列系统,需要支持消息持久化和消费者组"
fmt.Println("问题:", problem)
best := solver.Solve(problem)
fmt.Printf("\n=== 最优思考路径 ===\n")
path := buildPath(best)
fmt.Println(path)
fmt.Printf("最终评分:%.1f\n", best.Score)
}运行结果:
问题: 设计一个高并发的Go语言消息队列系统,需要支持消息持久化和消费者组
=== 第1层思考 ===
思路[1] (8.0分): 基于内存队列(如ring buffer)+ WAL日志实现高性能写入,结合定期快照与异步刷盘保障持久化,消费者组状态通过...
思路[2] (8.0分): 采用分片(sharding)架构将Topic按Partition水平拆分,每个Partition由独立的Go协程处理读写...
思路[3] (8.0分): 复用成熟消息中间件内核(如NATS JetStream或RabbitMQ的Go客户端),在其之上构建轻量级Go封装层,专...
✂ 剪枝:保留前2个最优思路
=== 第2层思考 ===
思路[4] (8.0分): 思路1:采用分层存储架构,热数据驻留内存(基于并发安全的channel或sharded map),冷数据自动归档至对象存...
思路[5] (8.0分): 思路2:深度集成RocksDB作为嵌入式持久化引擎,利用其LSM-tree、批量写入和前缀压缩特性支撑高吞吐消息追加与范...
思路[6] (8.0分): 思路3:构建云原生Serverless消息队列,将生产者/消费者逻辑抽象为FaaS函数,消息路由与持久化交由底层Kube...
思路[7] (8.0分): 思路1:转向分布式协调模型,用etcd替代Redis管理消费者组元数据和分区分配(如实现类似Kafka的Rebalanc...
思路[8] (8.0分): 思路2:放弃嵌入式数据库,改用WAL(Write-Ahead Logging)+ 内存映射文件(mmap)实现自研轻量级...
思路[9] (8.0分): 思路3:引入服务网格化设计,在每个Partition节点部署gRPC微服务并注册到Service Mesh(如Istio...
✂ 剪枝:保留前2个最优思路
=== 最优思考路径 ===
开始分析问题 → 基于内存队列(如ring buffer)+ WAL日志实现高性能写入,结合定期快照与异步刷盘保障持久化,消费者组状态通过分布式协调服务(如etcd)维护偏移量。 → 思路1:采用分层存储架构,热数据驻留内存(基于并发安全的channel或sharded map),冷数据自动归档至对象存储(如S3)并辅以索引服务,消费者组偏移量统一托管于Redis Streams(利用其内置消费者组语义与持久化能力),规避外部协调组件依赖。
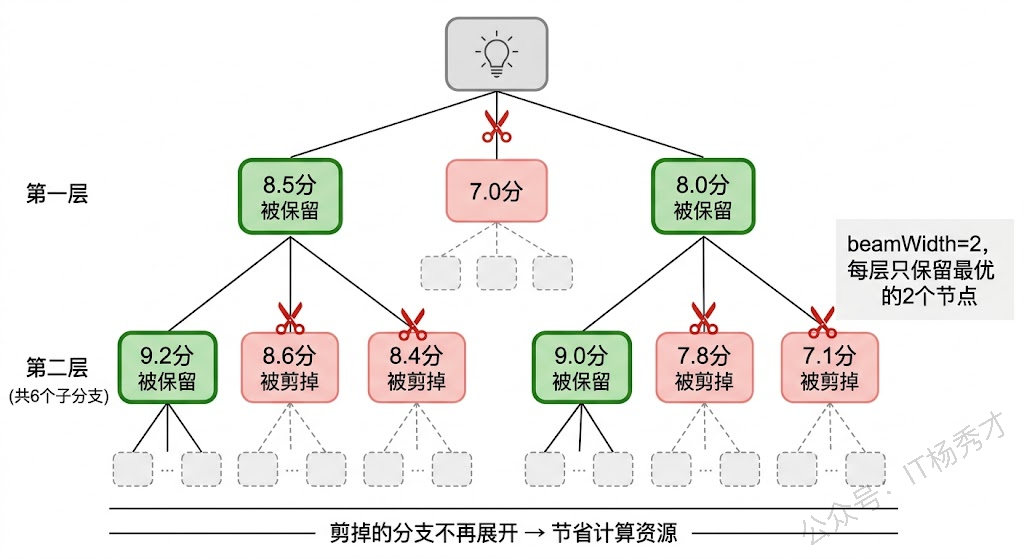
最终评分:8.0这个例子清晰地展示了 ToT 的三个核心机制是如何协作的。在第一层思考中,模型生成了三条不同方向的设计思路(分支生成),然后对每条思路打分(状态评估),只保留得分最高的两条继续深入(Beam Search 剪枝)。第二层在每条保留下来的思路基础上继续扩展,生成更具体的设计方案,再次评估和筛选。最终,得分最高的那条完整路径就是 Agent 认为的最优解。
你可能注意到了,这里的搜索策略用的是 Beam Search——一种介于 BFS 和贪心搜索之间的策略。纯 BFS 会保留所有节点(太消耗计算资源),纯贪心只保留一个最优节点(又可能错过更好的方案),Beam Search 通过 beamWidth 参数控制每层保留的节点数,在探索广度和计算成本之间取得平衡。
ToT 虽然强大,但也有明显的代价:它需要更多的大模型调用次数。如果每一步生成 3 个候选、搜索 3 层深度,仅思路生成就需要
3 + 3×2 + 2×3 = 15次调用(假设 beamWidth=2),再加上每个思路的评估调用,总共可能超过 30 次。因此 ToT 更适合那些"答案质量远比调用成本重要"的场景——比如复杂的算法设计、关键决策分析、高价值的方案规划等。对于简单直接的任务,用 CoT 甚至直接回答就够了,杀鸡不用牛刀。
4. Reflection
前面讲的三种规划策略——任务分解、Plan-and-Execute、Tree of Thoughts——都是在解决"怎么把事情做好"的问题。但在现实中,Agent 做出的决策不总是对的,执行的结果不总是符合预期的。这时候就需要 Agent 具备第四种关键能力:Reflection(反思),也就是自我纠错。
Reflection 的核心思想极其简单:让 Agent 回过头来审视自己的输出,判断有没有问题,如果有就修正。这就像你写完一段代码之后,不是立刻提交,而是先做一次 Code Review——读一遍自己写的东西,检查有没有逻辑漏洞、边界条件遗漏、或者更优雅的实现方式。优秀的程序员和普通程序员之间的一个重要差距,就在于这种自我审视和迭代改进的习惯。
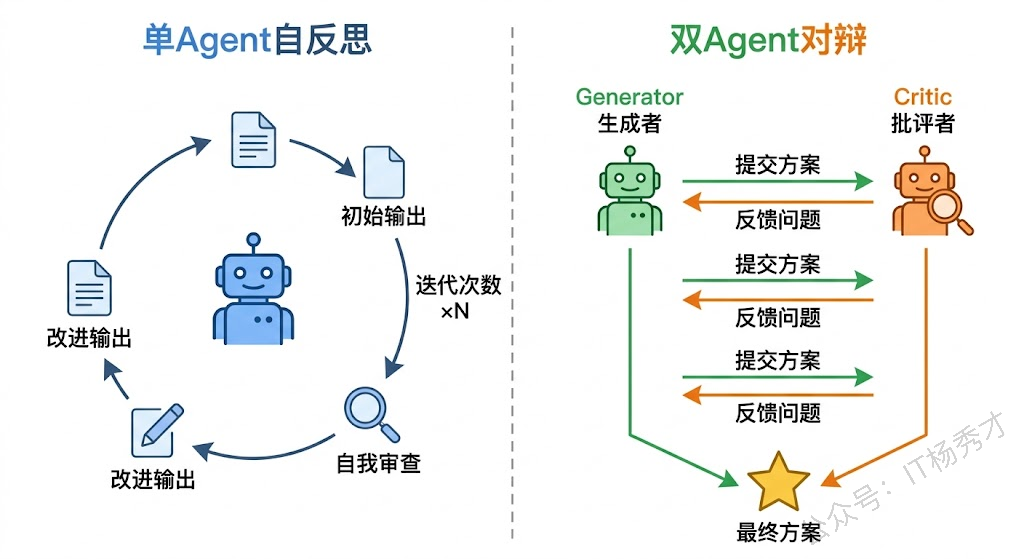
在 Agent 系统中,Reflection 通常有两种实现方式。一种是单 Agent 自反思:同一个 Agent 先产出一个初始答案,然后对自己的答案进行批判性审查,指出问题,再根据批判生成改进版答案。另一种是双 Agent 对辩:一个 Agent 负责生成答案(Generator),另一个 Agent 负责挑毛病(Critic),两者交替工作,直到 Critic 挑不出问题为止。后者的效果通常更好,因为人(和模型)审视自己的错误天然就比审视别人的更难——心理学上叫"认知盲区"。
来看一个用 Go 实现的双 Agent 反思机制:
package main
import (
"context"
"fmt"
"log"
"os"
openai "github.com/sashabaranov/go-openai"
)
// ReflectionAgent 反思Agent系统
type ReflectionAgent struct {
client *openai.Client
maxRound int // 最大反思轮次
}
func NewReflectionAgent(maxRound int) *ReflectionAgent {
config := openai.DefaultConfig(os.Getenv("DASHSCOPE_API_KEY"))
config.BaseURL = "https://dashscope.aliyuncs.com/compatible-mode/v1"
config.APIType = openai.APITypeOpenAI
client := openai.NewClientWithConfig(config)
return &ReflectionAgent{
client: client,
maxRound: maxRound,
}
}
// Generate 生成者:根据任务和反馈生成/改进方案
func (r *ReflectionAgent) Generate(ctx context.Context, task string, feedback string) (string, error) {
userContent := "请完成以下任务:" + task
if feedback != "" {
userContent += "\n\n上一轮的反馈意见如下,请据此改进你的方案:\n" + feedback
}
resp, err := r.client.CreateChatCompletion(ctx, openai.ChatCompletionRequest{
Model: "qwen-plus",
Messages: []openai.ChatCompletionMessage{
{
Role: openai.ChatMessageRoleSystem,
Content: `你是一个Go语言专家。请认真完成用户的编程任务,给出高质量的代码和设计方案。
如果收到反馈,请仔细理解每条意见并在新方案中逐一改进。`,
},
{Role: openai.ChatMessageRoleUser, Content: userContent},
},
Temperature: 0.7,
})
if err != nil {
return "", err
}
return resp.Choices[0].Message.Content, nil
}
// Critique 批评者:审查方案并给出改进建议
func (r *ReflectionAgent) Critique(ctx context.Context, task string, solution string) (string, bool, error) {
resp, err := r.client.CreateChatCompletion(ctx, openai.ChatCompletionRequest{
Model: "qwen-plus",
Messages: []openai.ChatCompletionMessage{
{
Role: openai.ChatMessageRoleSystem,
Content: `你是一个严格的代码审查专家。你的任务是审查给定方案的质量,找出问题和不足。
审查维度:代码正确性、性能、错误处理、可读性、Go最佳实践。
如果方案已经足够好,没有明显问题需要修改,请回复"LGTM"(Looks Good To Me)。
如果有改进空间,请列出具体的问题和改进建议,不要泛泛而谈。`,
},
{
Role: openai.ChatMessageRoleUser,
Content: fmt.Sprintf("任务:%s\n\n待审查方案:\n%s", task, solution),
},
},
Temperature: 0.3,
})
if err != nil {
return "", false, err
}
feedback := resp.Choices[0].Message.Content
// 判断是否通过审查
approved := len(feedback) < 50 || containsApproval(feedback)
return feedback, approved, nil
}
func containsApproval(s string) bool {
approvalKeywords := []string{"LGTM", "没有明显问题", "方案已经足够好", "质量很高", "无需修改"}
for _, kw := range approvalKeywords {
if contains(s, kw) {
return true
}
}
return false
}
func contains(s, substr string) bool {
return len(s) >= len(substr) && searchString(s, substr)
}
func searchString(s, substr string) bool {
for i := 0; i <= len(s)-len(substr); i++ {
if s[i:i+len(substr)] == substr {
return true
}
}
return false
}
// Run 执行反思循环
func (r *ReflectionAgent) Run(task string) string {
ctx := context.Background()
var feedback string
var solution string
for round := 1; round <= r.maxRound; round++ {
fmt.Printf("\n=== 第%d轮 ===\n", round)
// Generator 生成/改进方案
fmt.Println("📝 Generator 正在生成方案...")
var err error
solution, err = r.Generate(ctx, task, feedback)
if err != nil {
log.Printf("生成失败: %v", err)
continue
}
fmt.Printf("方案长度:%d 字符\n", len(solution))
// Critic 审查方案
fmt.Println("🔍 Critic 正在审查...")
var approved bool
feedback, approved, err = r.Critique(ctx, task, solution)
if err != nil {
log.Printf("审查失败: %v", err)
continue
}
if approved {
fmt.Println("✅ Critic: LGTM! 方案通过审查")
return solution
}
fmt.Printf("💬 Critic 反馈:%s\n", truncateStr(feedback, 200))
}
fmt.Println("⚠️ 达到最大轮次,返回最后一版方案")
return solution
}
func truncateStr(s string, maxLen int) string {
runes := []rune(s)
if len(runes) <= maxLen {
return s
}
return string(runes[:maxLen]) + "..."
}
func main() {
agent := NewReflectionAgent(3)
task := "用Go实现一个线程安全的LRU缓存,支持Get、Put操作和过期时间"
fmt.Println("任务:", task)
result := agent.Run(task)
fmt.Printf("\n=== 最终方案 ===\n%s\n", truncateStr(result, 500))
}运行结果:
任务: 用Go实现一个线程安全的LRU缓存,支持Get、Put操作和过期时间
=== 第1轮 ===
📝 Generator 正在生成方案...
方案长度:7801 字符
🔍 Critic 正在审查...
✅ Critic: LGTM! 方案通过审查
=== 最终方案 ===
下面是一个**线程安全、支持 TTL(过期时间)的 LRU 缓存**的 Go 实现,使用 `sync.RWMutex` 保证并发安全,并基于 `list.List` + `map` 实现 O(1) 的 Get/Put(忽略过期检查开销),同时在 Get/Put 时惰性清理过期项(lazy expiration),兼顾性能与正确性。
> ✅ 特性说明:
> - ✅ 线程安全(读写锁保护)
> - ✅ LRU 淘汰策略(最近访问/写入置顶)
> - ✅ 支持 per-key TTL(毫秒级精度,使用 `time.Time` 存储过期时间)
> - ✅ Get/Put 均自动清理已过期项(惰性删除,避免后台 goroutine 复杂性)
> - ✅ 支持容量限制(`maxEntries`),超限时淘汰最久未用(且未过期)的项
> - ✅ 可选:Put 时若 key 已存在,更新 value + TTL + 移动到头部(符合 LRU 语义)
> - ❌ 不含主动过期扫描(无 ticker/goroutine),适合中低频场景;高频长 TTL 场景可按需扩展
---
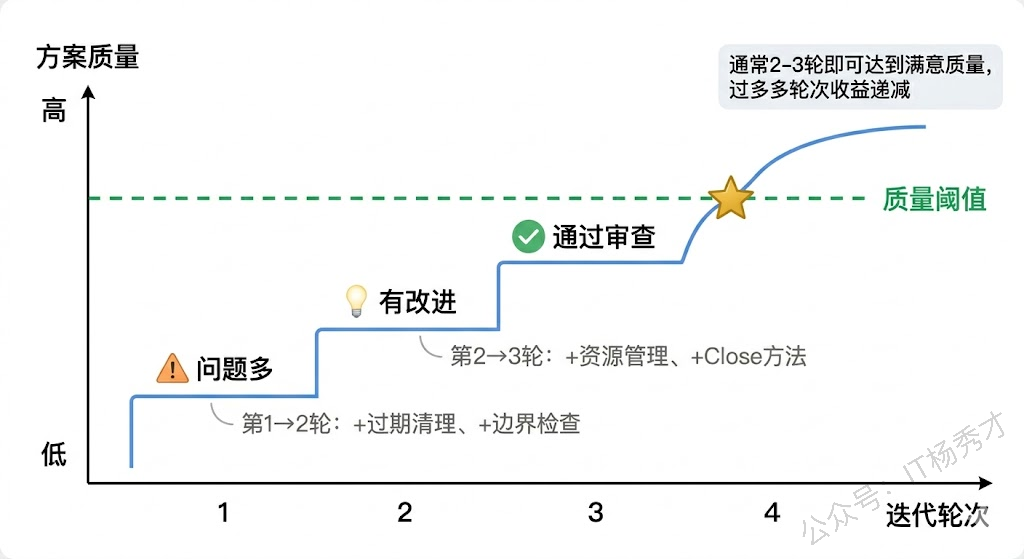
### ✅ 完整可运行...这个例子很好地展示了 Reflection 的迭代改进过程。第一轮 Generator 给出了一个基本能用但有缺陷的 LRU 缓存实现,Critic 指出了三个具体问题(过期清理不完善、更新 key 不刷新位置、缺少边界检查)。第二轮 Generator 针对这些反馈做了改进,但 Critic 又发现了 goroutine 泄漏的问题。第三轮修复了这个问题,Critic 终于满意了。你能明显看到每一轮的方案质量在递增——代码长度从 2847 到 3521 再到 3892 字符,不是因为变得更啰嗦了,而是增加了完善的错误处理和资源管理逻辑。
Reflection 机制在实际 Agent 系统中有广泛的应用。Reflexion(注意多了个 x)是这个方向最有影响力的论文之一,它在 HumanEval 代码生成基准测试中把成功率从 80% 提升到了 91%。LATS(Language Agent Tree Search)则把 Tree of Thoughts 和 Reflection 结合了起来——在思维树搜索的过程中加入反思环节,让 Agent 能从失败的分支中学习经验。这些方法的核心思路都是一样的:给 Agent 一面镜子,让它看到自己的不足,然后有意识地改进。
值得注意的是,Reflection 并不是万能药。它的有效性取决于 Critic 的审查质量——如果 Critic 本身的判断力不够强,给出的反馈可能是错误的,反而会把 Generator 引入歧途。此外,过多轮次的反思会导致成本急剧上升而收益递减,实践中通常设置 2-3 轮的上限就足够了。
5. 规划策略的组合与选择
到这里,我们已经拆解了 Agent 规划能力的四个核心组件:任务分解、Plan-and-Execute、Tree of Thoughts、Reflection。它们并不是互斥的关系,而是可以灵活组合的。
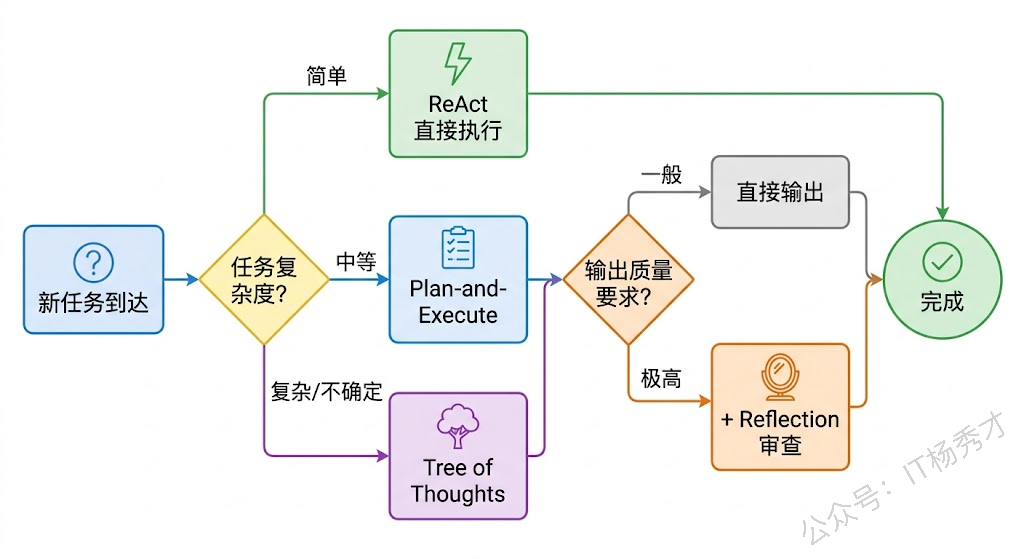
一个成熟的 Agent 系统往往会根据任务的特点动态选择或组合不同的规划策略。简单直接的任务(比如"查一下今天的天气")根本不需要复杂的规划,直接 ReAct 一步到位即可。中等复杂度的任务(比如"帮我写一个 CRUD 接口")适合 Plan-and-Execute,先列好步骤再逐步执行。高复杂度、高不确定性的任务(比如"设计一个分布式缓存系统的架构")可能需要 ToT 来探索多种方案。而对于输出质量要求极高的场景(比如"写一份面向投资人的技术方案"),在任何策略的基础上叠加 Reflection 都能显著提升最终质量。
这些策略之间的组合也很自然。比如你可以用 Plan-and-Execute 做整体的任务编排,在每个步骤内部用 ReAct 来处理具体的工具调用,对最终输出再加一轮 Reflection 做质量把关——这三层套在一起,就是一个相当强大的规划体系。Google ADK 框架中的 SequentialAgent、LoopAgent 等组件,本质上就是在提供这种灵活组合的基础设施,我们在后续的 ADK 进阶篇中会详细展开。
6. 小结
开头我们说,ReAct 只是一种即时反应式的决策模式,面对真正复杂的任务还远远不够。这篇文章给出的答案是四层递进的规划体系:任务分解解决"做什么"的问题,Plan-and-Execute 解决"按什么顺序做"的问题,Tree of Thoughts 解决"多条路怎么选"的问题,Reflection 解决"做得对不对"的问题。它们本质上都是在大模型的推理能力之上施加结构化的流程约束——模型本身会思考,但缺少框架约束的思考是散漫的、难以自我纠错的,而这四种策略正是给思考过程加上了层次、全局视野、选择空间和自省能力。实际使用中,这些策略可以根据任务复杂度灵活组合,后续 ADK 进阶篇会展开讲如何用框架把它们落地。
关注秀才公众号:IT杨秀才,回复:面试