Go Sync面试题
1. 除了 mutex 以外还有那些方式安全读写共享变量?
除了Mutex,主要还有信号量、通道(Channel),原子操作(atomic)这几种方式。
信号量的实现其实跟mutex差不多,实现起来也很方便,主要通过信号量计数来保证。chanenl是Go最推崇的方式,它通过通信来传递数据所有权,从根源上避免竞争,更适合复杂的业务逻辑;而原子操作则针对最简单的整型或指针等进行无锁操作,性能最高,常用于实现计数器或状态位。选择哪种,完全取决于数据结构的复杂度和业务的读写模型。
2. Go 语言是如何实现原子操作的?
Go语言实现原子操作,其根本是依赖底层CPU硬件提供的原子指令,而不是通过操作系统或更上层的锁机制。
具体来说,Go的sync/atomic包中的函数,在编译时会被编译器识别,并直接转换成对应目标硬件平台(如x86、ARM)的单条原子机器指令。例如,在x86架构上,atomic.AddInt64这类操作会对应到像LOCK; ADD这样的指令。前面的LOCK前缀是关键,它会锁住总线或缓存行,确保后续的ADD指令在执行期间,其他CPU核心不能访问这块内存,从而保证了整个操作的原子性。
3. 聊聊原子操作和锁的区别?
原子操作和锁最核心的区别在于它们的实现层级和保护范围。
原子操作是CPU硬件层面的“微观”机制,它保证对单个数据(通常是整型或指针)的单次读改写操作是绝对不可分割的,性能极高,因为它不涉及操作系统内核的介入和goroutine的挂起。
锁则是操作系统或语言运行时提供的“宏观”机制,它保护的是一个代码块(临界区),而不仅仅是单个变量。当获取锁失败时,它会让goroutine休眠,而不是空耗CPU。虽然锁的开销远大于原子操作,但它能保护一段复杂的、涉及多个变量的业务逻辑。
所以,对于简单的计数器或标志位更新,用原子操作追求极致性能;而只要需要保护一段逻辑或多个变量的一致性,就必须用锁。
4. Go语言互斥锁mutex底层是怎么实现的?
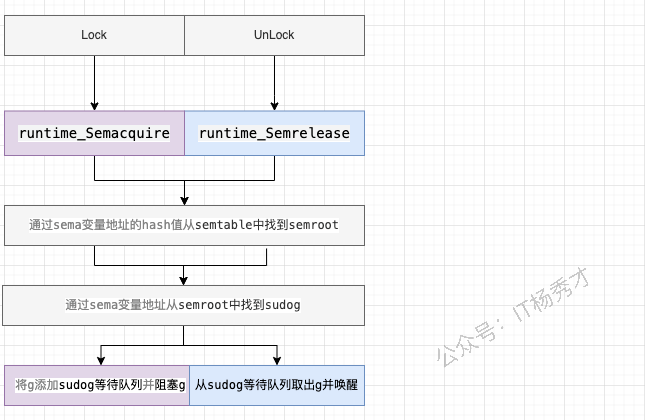
mutex底层是通过原子操作加信号量来实现的,通过atomic 包中的一些原子操作来实现锁的锁定,通过信号量来实现协程的阻塞与唤醒
分析
互斥锁对应的是底层结构是sync.Mutex结构体
type Mutex struct {
state int32
sema uint32
}state表示锁的状态,有锁定、被唤醒、饥饿模式等,并且是用state的二进制位来标识的,不同模式下会有不同的处理方式
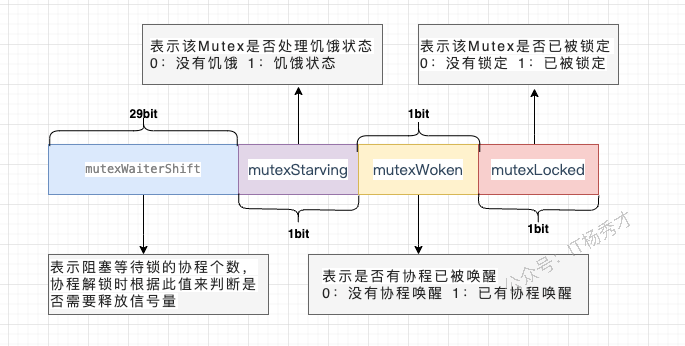
sema表示信号量,mutex阻塞队列的定位是通过这个变量来实现的,从而实现goroutine的阻塞和唤醒
5. Mutex 有几种模式?
Go的Mutex主要有两种模式:正常模式(Normal Mode)和饥饿模式(Starvation Mode)。
正常模式:这是默认模式,讲究的是性能。新请求锁的goroutine会和等待队列头部的goroutine竞争,新来的goroutine有几次“自旋”的机会,如果在此期间锁被释放,它就可以直接抢到锁。这种方式吞吐量高,但可能会导致队列头部的goroutine等待很久,即“不公平”。
饥饿模式:当一个goroutine在等待队列中等待超过1毫сан(1ms)后,Mutex就会切换到此模式,讲究的是公平。在此模式下,锁的所有权会直接从解锁的goroutine移交给等待队列的头部,新来的goroutine不会自旋,必须排到队尾。这样可以确保队列中的等待者不会被“饿死”。
当等待队列为空,或者一个goroutine拿到锁时发现它的等待时间小于1ms,饥饿模式就会结束,切换回正常模式。这两种模式的动态切换,是Go在性能和公平性之间做的精妙平衡。
6. 在Mutex上自旋的goroutine 会占用太多资源吗
并不会,因为Go的自旋设计得非常“克制”和“智能”。
首先,自旋不是无休止的空转,它有严格的次数和时间限制,通常只持续几十纳秒。其次,自旋仅仅在特定条件下才会发生,比如CPU核数大于1,并且当前机器不算繁忙(没有太多goroutine在排队)。它是在赌,与其付出“goroutine挂起和唤醒”这种涉及内核调度的巨大代价,不如原地“稍等一下”,因为锁可能马上就释放了。
所以,这种自旋是一种机会主义的短线优化,目的是用极小的CPU开销去避免一次昂贵的上下文切换,在锁竞争不激烈、占用时间极短的场景下,它反而是节省了资源。
7. Mutex 已经被一个 Goroutine 获取了, 其它等待中的 Goroutine 们只能一直等待。那么等这个锁释放后,等待中的 Goroutine 中哪一个会优先获取 Mutex 呢?
取决于Mutex当前处于正常模式还是饥饿模式。
在正常模式下,锁的分配是“不公平”的。当锁被释放时,等待队列中的第一个goroutine会被唤醒,但它不一定能拿到锁。它需要和那些此刻刚刚到达、正在自旋的新goroutine进行竞争。新来的goroutine因为正在CPU上运行,很有可能“插队”成功,直接抢到锁。这种策略的优点是吞吐量高,但缺点是可能导致等待队列中的goroutine被饿死。
而一旦Mutex进入饥饿模式,锁的分配就变得“绝对公平”。锁被释放后,会直接移交给等待队列的队头goroutine,任何新来的goroutine都不会参与竞争,必须乖乖排到队尾。
8. sync.Once 的作用是什么,讲讲它的底层实现原理?
sync.Once的作用是确保一个函数在程序生命周期内,无论在多少个goroutine中被调用,都只会被执行一次。它常用于单例对象的初始化或一些只需要执行一次的全局配置加载
sync.Once保证代码段只执行1次的原理主要是其内部维护了一个标识位,当它 == 0 时表示还没执行过函数,此时会加锁修改标识位,然后执行对应函数。后续再执行时发现标识位 != 0,则不会再执行后续动作了
分析
Once其实是一个结构体
type Once struct {
done uint32 // 标识位
m Mutex
}核心依赖一个uint32的done标志位和一个互斥锁Mutex,
当Once.Do(f)首次被调用时:
它首先会通过原子操作(
atomic.LoadUint32)快速检查done标志位。如果done为1,说明初始化已完成,直接返回,这个路径完全无锁,开销极小。如果
done为0,说明可能是第一次调用,这时它会进入一个慢路径(doSlow)。在慢路径里,它会先加锁,然后再次检查
done标志位。这个“双重检查”(Double-Checked Locking)是关键,它防止了在多个goroutine同时进入慢路径时,函数f被重复执行。如果此时
done仍然为0,那么当前goroutine就会执行传入的函数f。执行完毕后,它会通过原子操作(atomic.StoreUint32)将done标志位置为1,最后解锁。
之后任何再调用Do的goroutine,都会在第一步的原子Load操作时发现done为1而直接返回。整个过程结合了原子操作的速度和互斥锁的安全性,高效且线程安全地实现了“仅执行一次”的保证
9. WaiGroup 是怎样实现协程等待?
WaitGroup实现等待,本质上是一个原子计数器和一个信号量的协作。
调用Add会增加计数值,Done会减计数值。而Wait方法会检查这个计数器,如果不为零,就利用信号量将当前goroutine高效地挂起。直到最后一个Done调用将计数器清零,它就会通过这个信号量,一次性唤醒所有在Wait处等待的goroutine,从而实现等待目的。
分析:
waitgroup的结构定义:
// A WaitGroup waits for a collection of goroutines to finish.
// The main goroutine calls Add to set the number of goroutines to wait for.
// Then each of the goroutines runs and calls Done when finished. At the same
// time, Wait can be used to block until all goroutines have finished.
//
// A WaitGroup must not be copied after first use.
type WaitGroup struct {
noCopy noCopy // 用于vet工具检查是否被复制
// 64位的值:高32位是计数器,低32位是等待的goroutine数量。
// 通过原子操作访问,保存了状态和等待者数量。
state atomic.Uint64
// 用于等待者休眠的信号量。
sema uint32
}noCopy: 这是一个特殊的字段,用于静态分析工具(go vet)在编译时检查WaitGroup实例是否被复制。WaitGroup被复制后会导致状态不一致,可能引发程序错误,因此该字段的存在旨在防止此类问题的发生。
state: 这是WaitGroup的核心,一个64位的无符号整型,通过sync/atomic包进行原子操作,以保证并发安全。这个64位的空间被巧妙地分成了两部分:
高32位: 作为计数器(counter),记录了需要等待的 goroutine 的数量。
低32位: 作为等待者计数器(waiter count),记录了调用
Wait()方法后被阻塞的 goroutine 的数量。
sema: 这是一个信号量,用于实现 goroutine 的阻塞和唤醒。当主 goroutine 调用Wait()方法且计数器不为零时,它会通过这个信号量进入休眠状态。当所有子 goroutine 完成任务后,会通过这个信号量来唤醒等待的主 goroutine。
10. 讲讲sync.Map的底层原理
sync.Map的底层核心是“空间换时间”,通过两个Map(read和dirty)** 的冗余结构,实现“读写分离”,最终达到针对特定场景的“读”操作无锁优化。
它的read是一个只读的map,提供无锁的并发读取,速度极快。写操作则会先操作一个加了锁的、可读写的dirty map。当dirty map的数据积累到一定程度,或者read map中没有某个key时,sync.Map会将dirty map里的数据“晋升”并覆盖掉旧的read map,完成一次数据同步。
分析:
sync.Map的结构定义
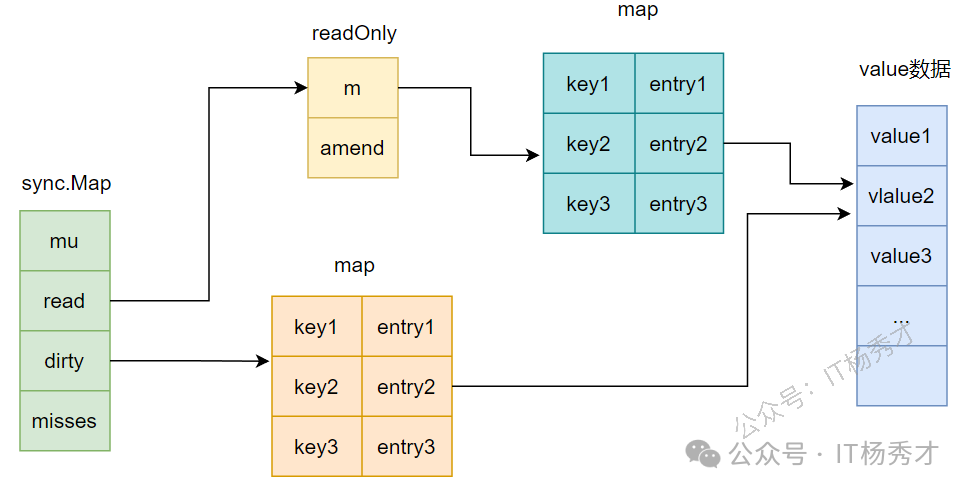
type Map struct {
mu Mutex // 用于保护dirty字段的锁
read atomic.Value // 只读字段,其实际的数据类型是一个readOnly结构
dirty map[interface{}]*entry //需要加锁才能访问的map,其中包含在read中除了被expunged(删除)以外的所有元素以及新加入的元素
misses int // 计数器,记录在从read中读取数据的时候,没有命中的次数,当misses值等于dirty长度时,dirty提升为read
}read字段的类型是atomic.Value,但是在使用中里面其实存储的是readOnly结构,readOnly结构定义如下:
// readOnly is an immutable struct stored atomically in the Map.read field.
type readOnly struct {
m map[interface{}]*entry // key为任意可比较类型,value为entry指针
amended bool // amended为true,表明dirty中包含read中没有的数据,为false表明dirty中的数据在read中都存在
}entry这个结构:
type entry struct {
p unsafe.Pointer // p指向真正的value所在的地址
}
11. read map和dirty map之间有什么关联?
它们之间是“只读缓存”和“最新全集”的关联。
read map是dirty map的一个不完全、且可能是过期的只读快照。dirty map则包含了所有的最新数据。
具体来说,read map中的所有数据,在dirty map里一定存在。一个key如果在read map里,那它的value要么就是最终值,要么就是一个特殊指针,指向dirty map里对应的条目。而dirty map里有,read map里却可能没有,因为dirty是最新、最全的。
当dirty map积累了足够多的新数据后,它会“晋升”为新的read map,旧的read map则被废弃。这个过程,就完成了“缓存”的更新。
12. 为什么要设计nil和expunged两种删除状态?
设计nil和expunged这两个状态,是为了解决在sync.Map的“读写分离”架构下,如何高效、无锁地处理“删除”操作。
因为read map本身是只读的,我们不能直接从中删除一个key。所以,当用户调用Delete时,如果这个key只存在于read map中,系统并不会真的删除它,而是将它的值标记为一个特殊的“已删除”状态,这个状态就是expunged。后续的读操作如果看到这个expunged标记,就知道这个key其实已经不存在了,直接返回nil, false。
而nil则是一个中间状态,主要用于dirty map和read map的同步过程,表示这个key正在被删除或迁移。
简单来说,这两个状态就像是在只读的read map上打的“逻辑删除”补丁。它避免了因为一次Delete操作就引发加锁和map的整体复制,把真正的物理删除延迟到了dirty map“晋升”为read map的那一刻,是典型的用状态标记来换取无锁性能的设计。
13. sync.Map 适用的场景?
sync.Map适合读多写少的场景,而不是和写多读少的场景。
因为我们期望将更多的流量在read map这一层进行拦截,从而避免加锁访问dirty map
对于更新,删除,读取,read map可以尽量通过一些原子操作,让整个操作变得无锁化,这样就可以避免进一步加锁访问dirty map。倘若写操作过多,sync.Map 基本等价于一把互斥锁 + map,其读写效率会大大下降
关注秀才公众号:IT杨秀才,领取精品学习资料
- 公众号后台回复:Go面试,领取Go面试题库PDF
- 公众号后台回复:Go学习,领取Go必看书籍
- 公众号后台回复:大模型,领取大模型学习资料
- 公众号后台回复:111,领取架构学习资料
- 公众号后台回复:26届秋招,领取26届秋招企业汇总表