Go Map面试题
1. Go语言Map的底层实现原理是怎样的?
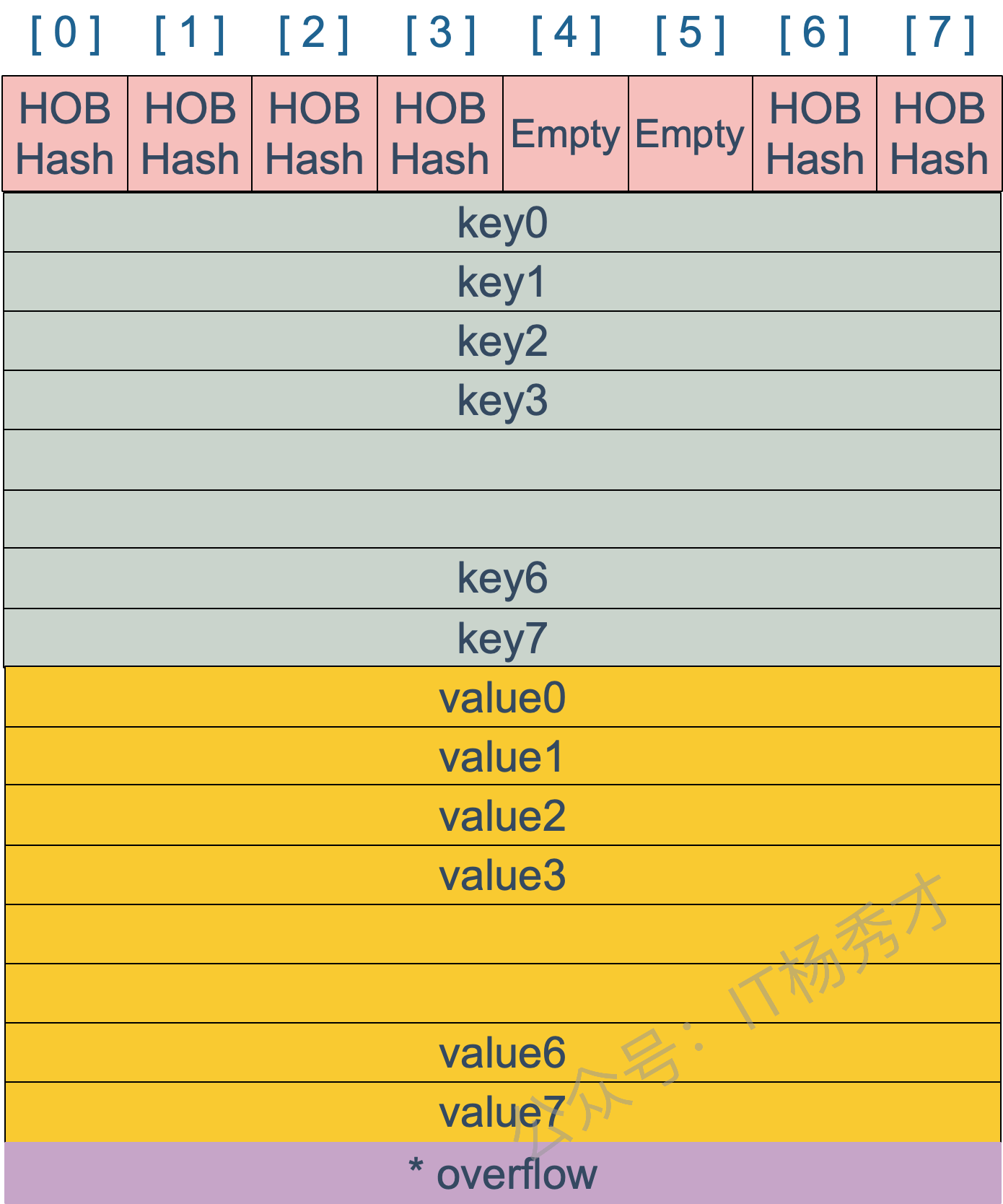
map的就是一个hmap的结构。Go Map的底层实现是一个哈希表。它在运行时表现为一个指向hmap结构体的指针,hmap中记录了桶数组指针buckets、溢出桶指针以及元素个数等字段。每个桶是一个bmap结构体,能存储8个键值对和8个tophash,并有指向下一个溢出桶的指针overflow。为了内存紧凑,bmap中采用的是先存8个键再存8个值的存储方式。
分析:
hmap结构定义:
// A header for a Go map.
type hmap struct {
count int // map中元素个数
flags uint8 // 状态标志位,标记map的一些状态
B uint8 // 桶数以2为底的对数,即B=log_2(len(buckets)),比如B=3,那么桶数为2^3=8
noverflow uint16 //溢出桶数量近似值
hash0 uint32 // 哈希种子
buckets unsafe.Pointer // 指向buckets数组的指针
oldbuckets unsafe.Pointer // 是一个指向buckets数组的指针,在扩容时,oldbuckets 指向老的buckets数组(大小为新buckets数组的一半),非扩容时,oldbuckets 为空
nevacuate uintptr // 表示扩容进度的一个计数器,小于该值的桶已经完成迁移
extra *mapextra // 指向mapextra 结构的指针,mapextra 存储map中的溢出桶
}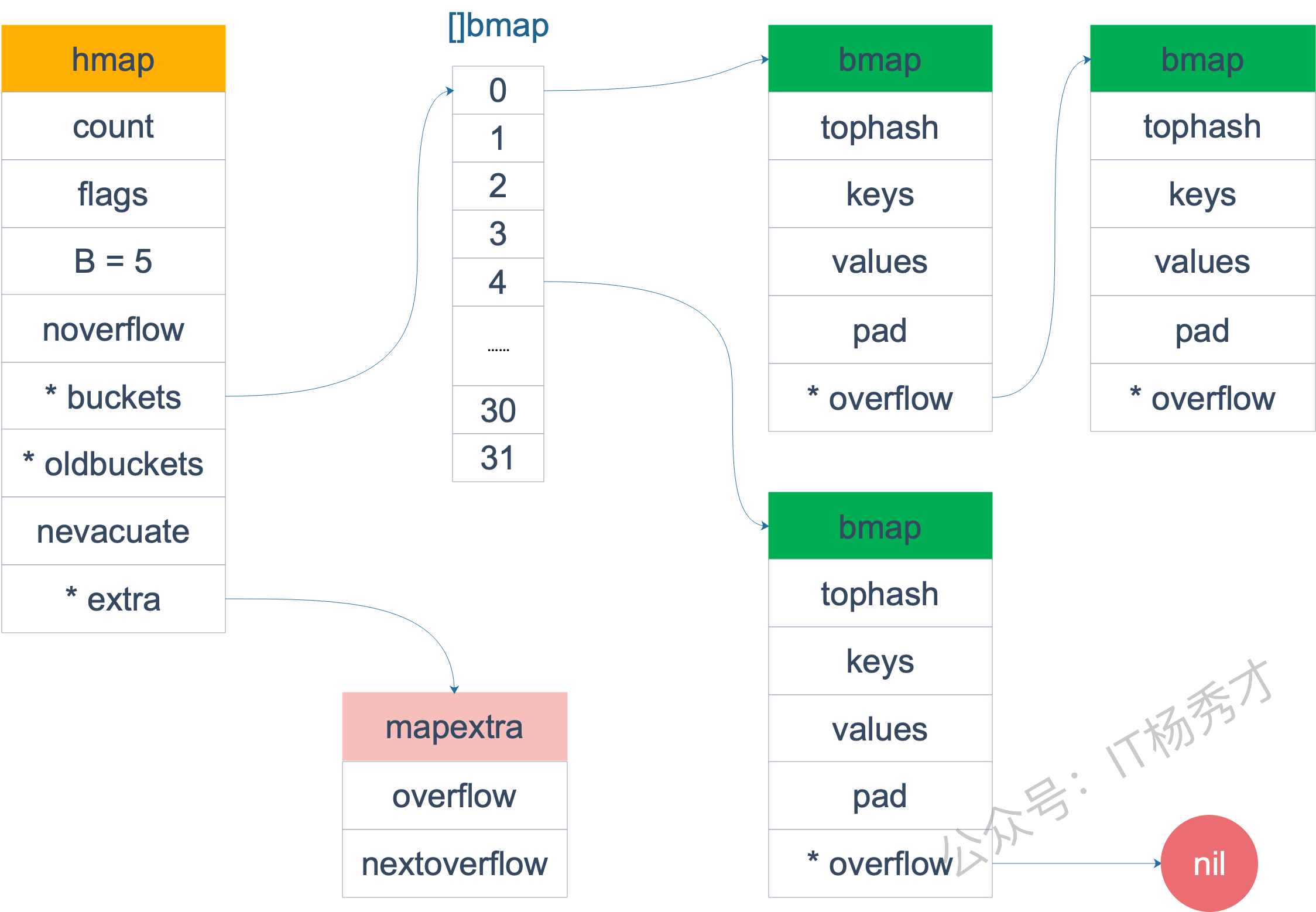
bmap结构如下:
2. Go语言Map的遍历是有序的还是无序的?
Go语言里Map的遍历是完全随机的,并没有固定的顺序。map每次遍历,都会从一个随机值序号的桶,在每个桶中,再从按照之前选定随机槽位开始遍历,所以是无序的。
3. Go语言Map的遍历为什么要设计成无序的?
map 在扩容后,会发生 key 的搬迁,原来落在同一个 bucket 中的 key,搬迁后,有些 key 就要远走高飞了(bucket 序号加上了 2^B)。而遍历的过程,就是按顺序遍历 bucket,同时按顺序遍历 bucket 中的 key。搬迁后,key 的位置发生了重大的变化,有些 key 飞上高枝,有些 key 则原地不动。这样,遍历 map 的结果就不可能按原来的顺序了。
Go团队为了避免开发者写出依赖底层实现细节的脆弱代码,而有意为之的一个设计。通过在遍历时引入随机数,Go从根本上杜绝了程序员依赖特定遍历顺序的可能性,强制我们写出更健壮的代码。
4. Map如何实现顺序读取?
如果业务上确实需要有序遍历,最规范的做法就是将Map的键(Key)取出来放入一个切片(Slice)中,用sort包对切片进行排序,然后根据这个有序的切片去遍历Map。
package main
import (
"fmt"
"sort"
)
func main() {
keyList := make([]int, 0)
m := map[int]int{
3: 200,
4: 200,
1: 100,
8: 800,
5: 500,
2: 200,
}
for key := range m {
keyList = append(keyList, key)
}
sort.Ints(keyList)
for _, key := range keyList {
fmt.Println(key, m[key])
}
}5. Go语言的Map是否是并发安全的?
map 不是线程安全的。
在查找、赋值、遍历、删除的过程中都会检测写标志,一旦发现写标志置位(等于1),则直接 panic。赋值和删除函数在检测完写标志是复位之后,先将写标志位置位,才会进行之后的操作。
检测写标志:
if h.flags&hashWriting == 0 {
throw("concurrent map writes")
}设置写标志:
h.flags |= hashWriting6. Map的Key一定要是可比较的吗?为什么?
Map的Key必须要可比较。
首先,Map会对我们提供的Key进行哈希运算,得到一个哈希值。这个哈希值决定了这个键值对大概存储在哪个位置(也就是哪个“桶”里)。然而,不同的Key可能会产生相同的哈希值,这就是“哈希冲突”。当多个Key被定位到同一个“桶”里时,Map就没法只靠哈希值来区分它们了。此时,它必须在桶内进行逐个遍历,用我们传入的Key和桶里已有的每一个Key进行**相等(==)**比较。这样才能确保我们操作的是正确的键值对。
7. Go语言Map的扩容时机是怎样的?
向 map 插入新 key 的时候,会进行条件检测,符合下面这 2 个条件,就会触发扩容
装载因子超过阈值,源码里定义的阈值是 6.5,这个时候会触发双倍扩容
overflow 的 bucket 数量过多:
当 B 小于 15,也就是 bucket 总数 2^B 小于 2^15 时,如果 overflow 的 bucket 数量超过 2^B;
当 B >= 15,也就是 bucket 总数 2^B 大于等于 2^15,如果 overflow 的 bucket 数量超过 2^15
这两种情况下会触发双倍扩容
8. Go语言Map的扩容过程是怎样的?
Go的扩容是渐进式(gradual)的。它不会在触发扩容时“stop the world”来一次性把所有数据搬迁到新空间,而是只分配新空间,然后在后续的每一次插入、修改或删除操作时,才会顺便搬迁一两个旧桶的数据。这种设计将庞大的扩容成本分摊到了多次操作中,极大地减少了服务的瞬间延迟(STW),保证了性能的平滑性。
如果是触发双倍扩容,会新建一个buckets数组,新的buckets数量大小是原来的2倍,然后旧buckets数据搬迁到新的buckets。如果是等量扩容,buckets数量维持不变,重新做一遍类似双倍扩容的搬迁动作,把松散的键值对重新排列一次,使得同一个 bucket 中的 key 排列地更紧密,这样节省空间,存取效率更高
9. 可以对Map的元素取地址吗?
无法对 map 的 key 或 value 进行取址。会发生编译报错,这样设计主要是因为map一旦发生扩容,key 和 value 的位置就会改变,之前保存的地址也就失效了。
示例:
package main
import "fmt"
func main() {
m := make(map[string]int)
fmt.Println(&m["qcrao"])
}会出现编译报错:
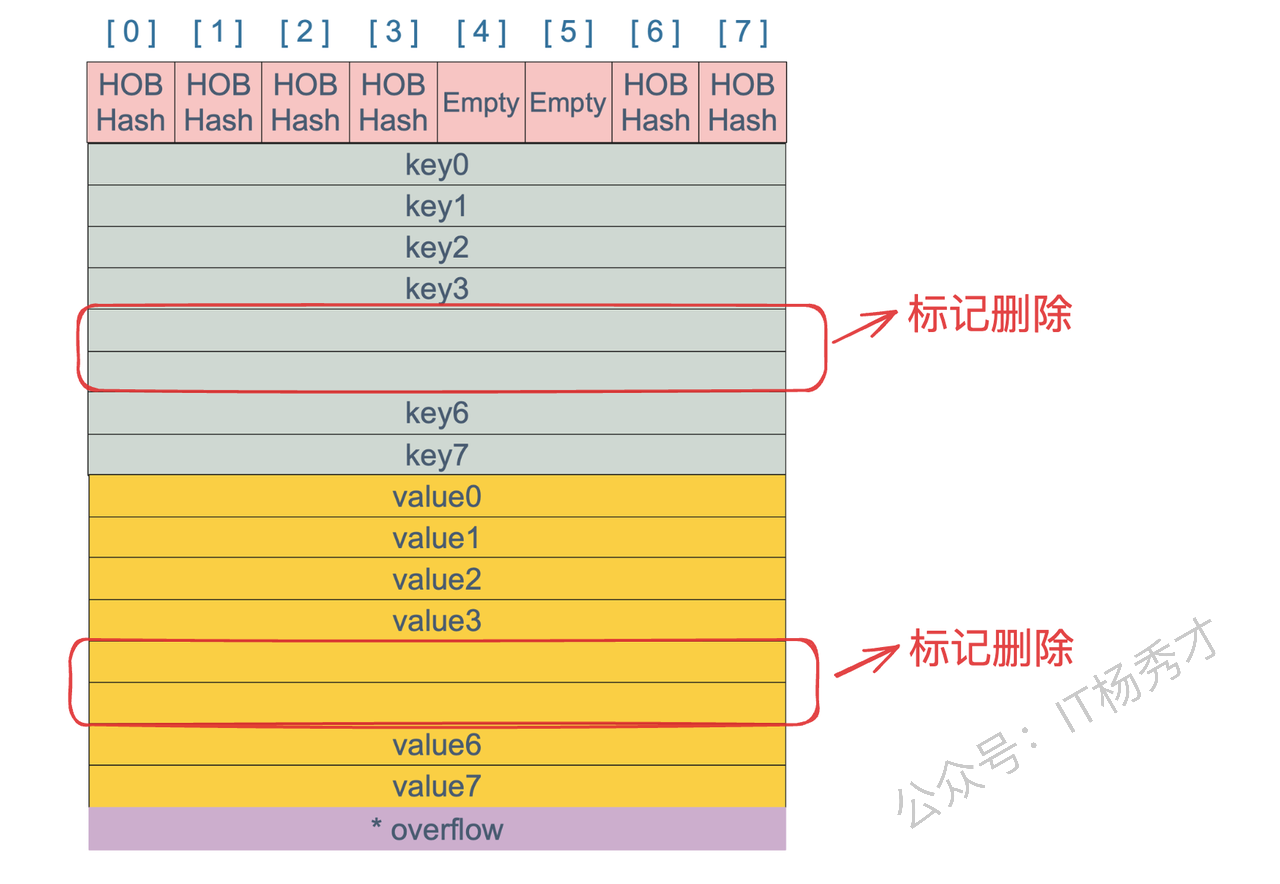
./main.go:8:14: cannot take the address of m["qcrao"]10. Map 中删除一个 key,它的内存会释放么?
不会,delete一个key,并不会立刻释放或收缩Map占用的内存。具体来说,delete(m, key) 这个操作,只是把key和value对应的内存块标记为“空闲”,让它们的内容可以被后续的垃圾回收(GC)处理掉。但是,Map底层为了存储这些键值对而分配的“桶”(buckets)数组,它的规模是不会缩小的。只有在置空这个map的时候,整个map的空间才会被垃圾回后释放
11. Map可以边遍历边删除吗
map 并不是一个线程安全的数据结构。如果多个线程边遍历,边删除,同时读写一个 map 是未定义的行为,如果被检测到,会直接 panic。
如果是发生在多个协程同时读写同一个 map 的情况下。 如果在同一个协程内边遍历边删除,并不会检测到同时读写,理论上是可以这样做的。但是,遍历的结果就可能不会是相同的了,有可能结果遍历结果集中包含了删除的 key,也有可能不包含,这取决于删除 key 的时间:是在遍历到 key 所在的 bucket 时刻前或者后。这种情况下,可以通过加读写锁sync.RWMutex来保证
关注秀才公众号:IT杨秀才,领取精品学习资料
- 公众号后台回复:Go面试,领取Go面试题库PDF
- 公众号后台回复:Go学习,领取Go必看书籍
- 公众号后台回复:大模型,领取大模型学习资料
- 公众号后台回复:111,领取架构学习资料
- 公众号后台回复:26届秋招,领取26届秋招企业汇总表